Previous: L05 — Transformers | Back to MPL Index | Next: (y-07) Multimodal
This lecture covers:
- Vision Transformer (ViT)
- Object Detection with ViTs (DETR)
- Self-supervised Vision Transformers (DINO)
Mental Model First
- ViT treats an image as a sequence of patches, then applies the Transformer machinery from language.
- CNNs bake in locality and translation bias; ViTs are more flexible but must learn more structure from data.
- DETR shows that detection can be framed as set prediction, and DINO shows that strong visual representations can emerge even without labels.
- If one question guides this lecture, let it be: what changes when we stop treating vision as a grid of convolutions and start treating it as a sequence problem?
Vision Transformer (ViT)
Limitations of CNNs
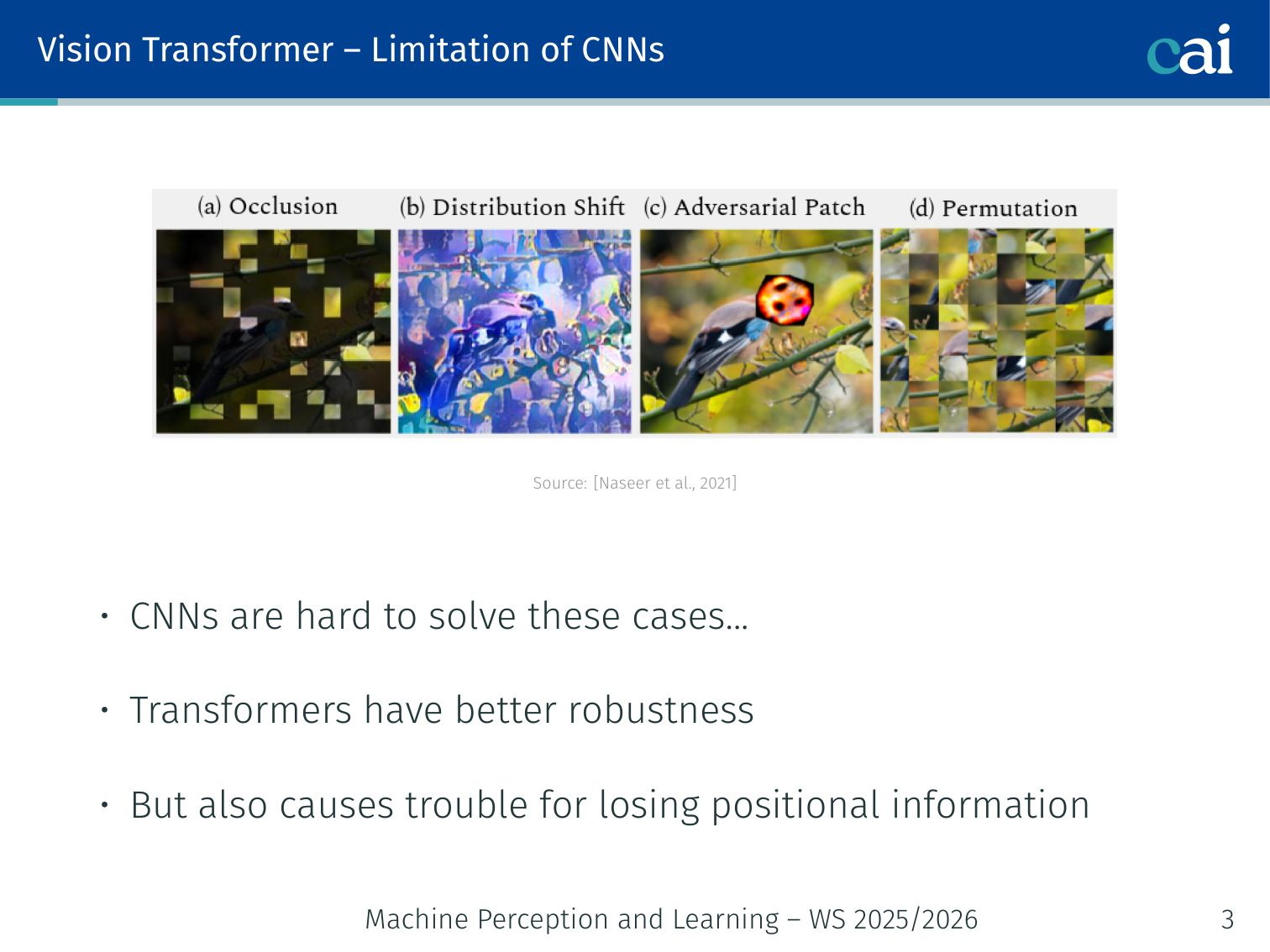
CNNs can be surprisingly fragile when it comes to changes in texture or distribution.
CNNs have several weaknesses that motivated looking at Transformer alternatives (Naseer et al., 2021):
- CNNs are brittle to certain distribution shifts (adversarial texture changes, style transfer) that humans handle easily
- Transformers show better robustness to such perturbations — because they are not constrained to local receptive fields
- However, Transformers also cause trouble by losing positional information unless position is explicitly encoded
Replacing CNNs with Self-Attention (Ramachandran et al., 2019)
What if we just used self-attention instead of convolution? It actually works.
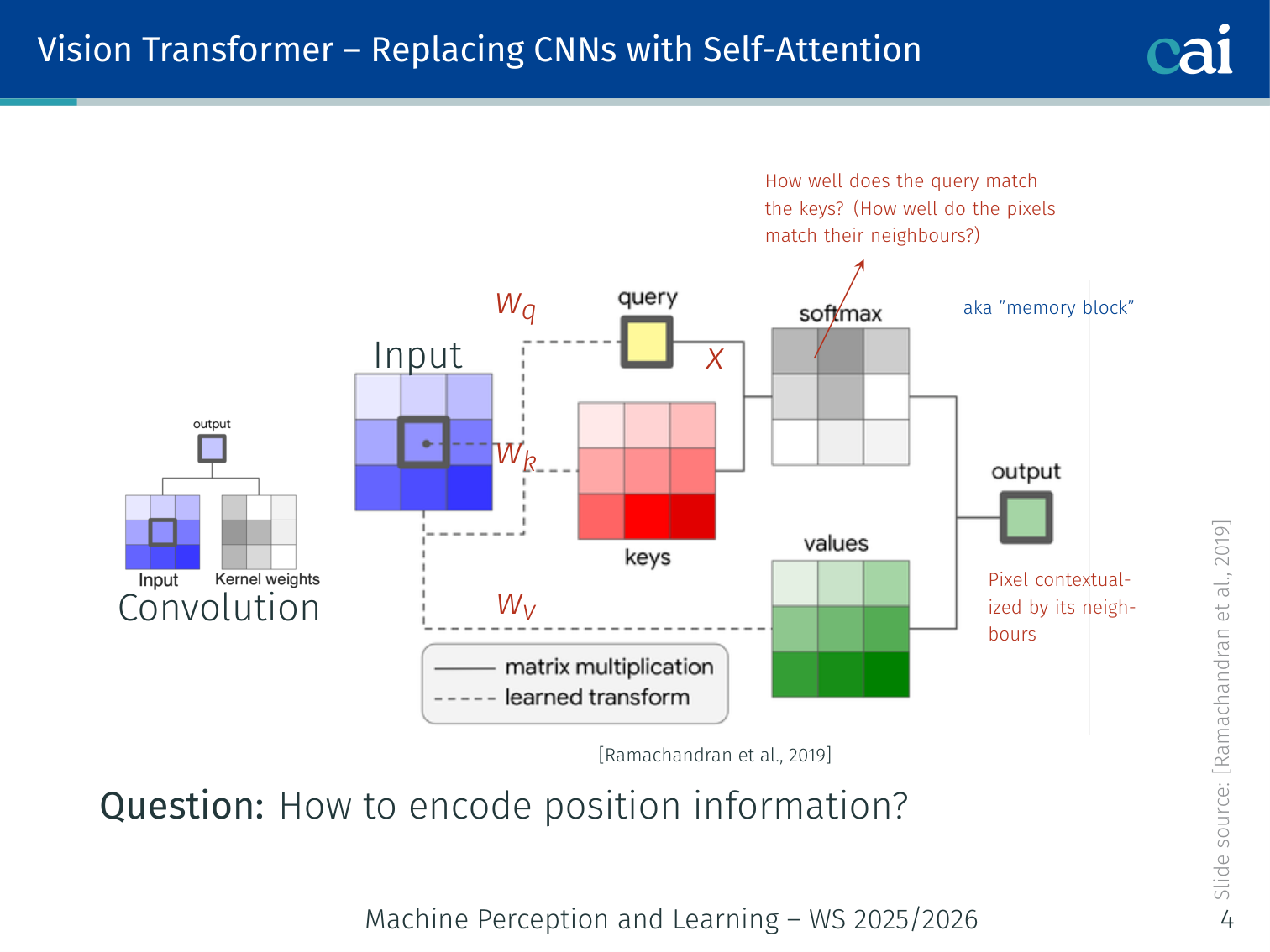
Before the full ViT, Ramachandran et al. (2019) showed that convolution layers can be replaced by stand-alone self-attention layers:
In a convolution, each output pixel is a weighted sum over a local neighbourhood. In self-attention form:
- , , : query, key, value projected from pixel features
- : relative position embedding — encodes the spatial offset between and its neighbour
This allows the model to ask “how well do the pixel features match their neighbours?” — just like convolution does, but with learned, data-dependent weights.
Key question: how to encode position in a 2D grid? The answer in the full ViT: add 2D position embeddings that are either fixed-sinusoidal or learned.
💡 Intuition: Why Patches? (The “Pixel vs. Word” Analogy)
In a sentence, a word is a meaningful unit. In an image, a single pixel is almost meaningless.
If we fed every pixel into a Transformer, a 224x224 image would have 50,176 tokens. Because attention is , this would be impossible to compute ( operations per layer!).
The Solution: By grouping pixels into 16x16 patches, we treat each patch like a “word”. Now we only have 196 tokens, which is a sequence length Transformers can handle easily.
🧠 Deep Dive: The Data-Inductive Bias Tradeoff
Why do CNNs beat ViT on small datasets, but ViT wins on huge datasets?
- Inductive Bias (The “Cheat Code”): CNNs “know” that images have local structure (pixels near each other are related) and that a cat is a cat whether it’s on the left or right (translation equivariance). This knowledge is a “cheat code” that helps the model learn faster with less data.
- The Transformer “Tabula Rasa”: ViT starts with almost no assumptions. It doesn’t even know that patches are arranged in a grid! It has to learn the spatial relationships from scratch.
- The Result: On a small dataset (ImageNet-1K), the “cheat code” (CNN) wins. But on a massive dataset (JFT-300M), the assumptions of the CNN actually become a limitation. The Transformer, free of those assumptions, can learn more complex, flexible representations that eventually surpass the CNN.
Vision Transformer (ViT) — Main Workflow
![]()
Step 1 of the ViT workflow: break the image into a sequence of small patches.
![]()
Step 2: feed those patches into a standard Transformer encoder, just like words in a sentence.
Paper: Dosovitskiy et al. “An Image is Worth 16×16 Words: Transformers for Image Recognition at Scale.” ICLR 2021.
The ViT processes images as a sequence of fixed-size patches fed into a standard Transformer encoder.
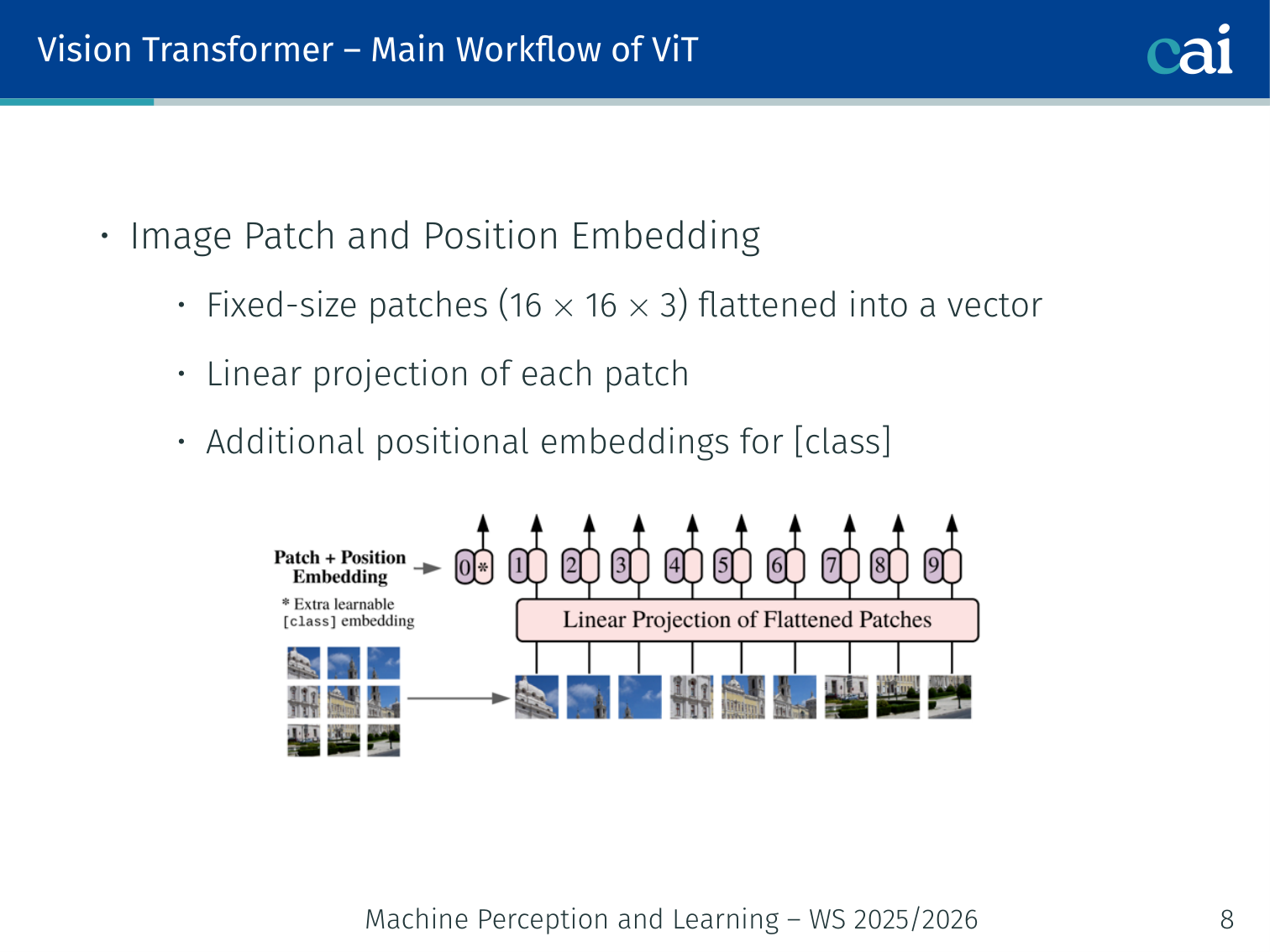
Step 1: Image Patch and Position Embedding
Here's a closer look at how we extract patches and add those crucial positional embeddings.
- Split the image into fixed-size 16×16 patches (or 32×32) and flatten each patch into a vector
- Apply a linear projection to map each flattened patch to dimensions
- Add learnable positional embeddings (one per patch position)
- Prepend a learnable [CLS] token — its final representation is used for classification
For a 224×224 image with 16×16 patches:
- Number of patches:
- Flattened patch size:
- Sequence length fed to Transformer: (patches + [CLS])
Example — patchifying a photo: a 224×224 RGB image of a dog becomes 196 patch tokens. Some tokens mostly contain grass, some contain the dog’s face, and others contain background sky. After patchification, the Transformer reasons over a 197-token sequence (
[CLS]+ 196 patches), not over the original pixel grid directly.
Image (224×224×3)
↓ split into non-overlapping 16×16 patches
196 patches, each 768-dimensional
↓ linear projection
196 tokens, each d_model=768
↓ prepend [CLS] token + add positional embeddings
197 tokens of dimension 768
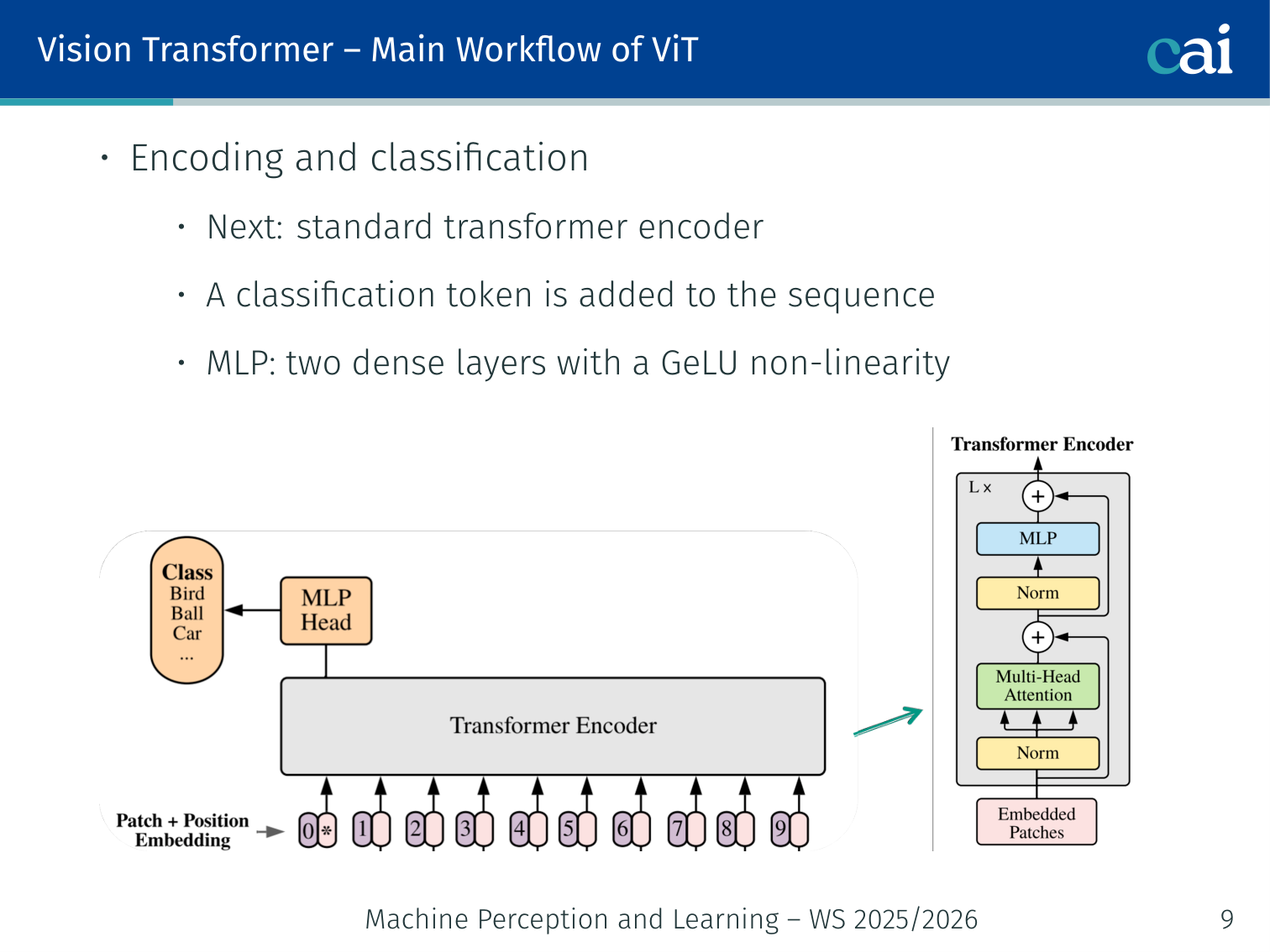
Step 2: Encoding and Classification
Step 2: Transformer encoding and [CLS] token classification
- Feed the 197-token sequence into a standard Transformer encoder (same architecture as L05)
- MLP head: two dense layers with GeLU non-linearity (not ReLU — GeLU is smoother and empirically better for ViT)
- Use the [CLS] token output to make the final class prediction
197 tokens → [Transformer Encoder × L layers] → [CLS] output → [MLP head] → class logits
Why [CLS]? The [CLS] token has no patch-specific meaning — it aggregates global information from all patches via attention over all layers. This idea is borrowed directly from BERT.
ViT Architecture Versions
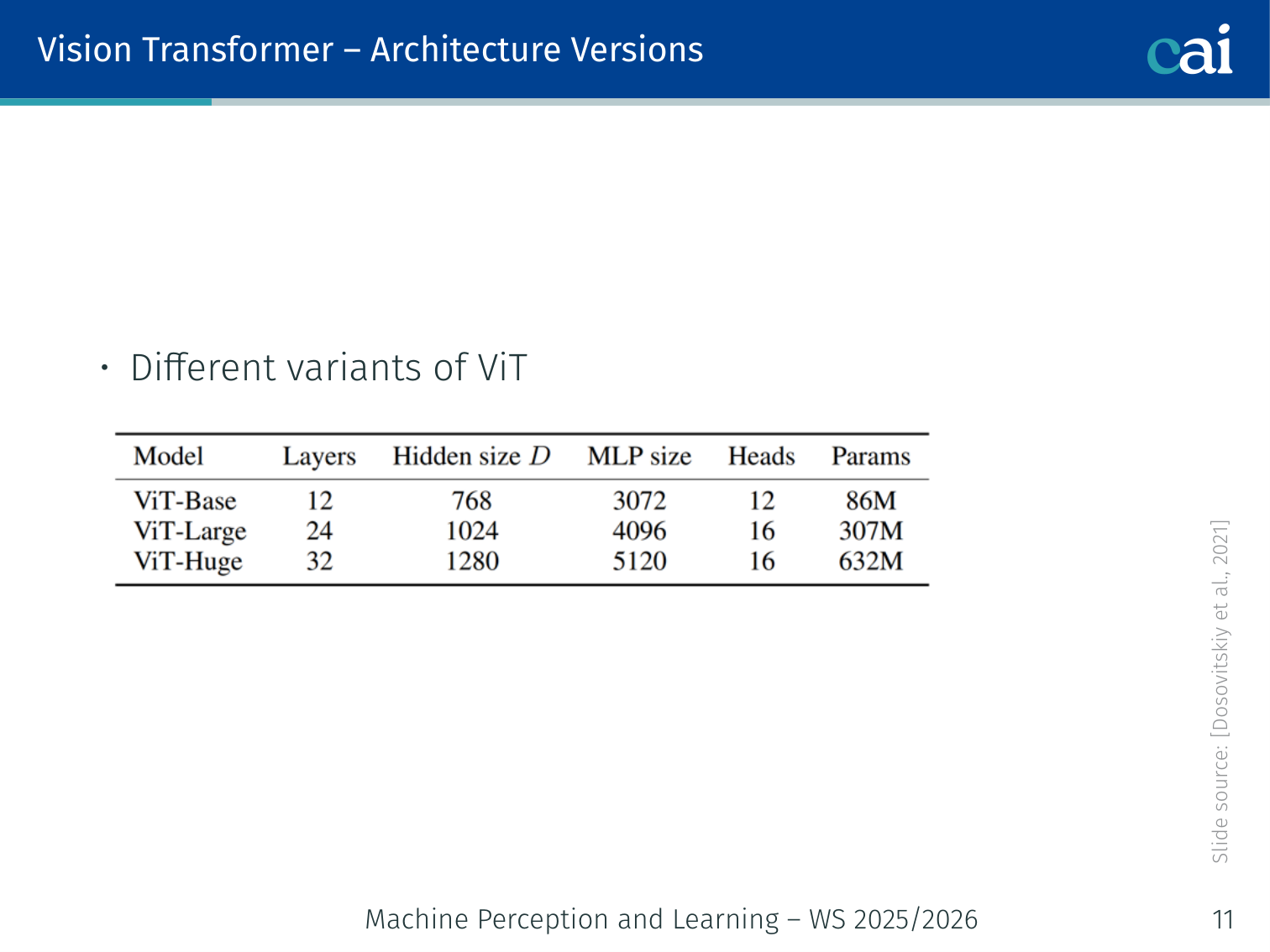
Comparison of ViT-Base, ViT-Large, and ViT-Huge configurations
Three standard variants (Dosovitskiy et al., 2021):
| Model | Layers | Hidden size | MLP size | Heads | Params |
|---|---|---|---|---|---|
| ViT-Base | 12 | 768 | 3072 | 12 | 86M |
| ViT-Large | 24 | 1024 | 4096 | 16 | 307M |
| ViT-Huge | 32 | 1280 | 5120 | 16 | 632M |
Both 16×16 and 32×32 patch sizes are used. Smaller patches = more tokens = more compute but better fine-grained features.
Data Requirements
ViT performance vs data scale: ImageNet-1K to JFT-300M
ViTs have fewer inductive biases than CNNs (no built-in locality or translation equivariance) — so they require more data to learn these structures from scratch.
Dataset scaling experiment (Dosovitskiy et al., 2021):
| Pre-training dataset | Size | ViT-L vs ResNet |
|---|---|---|
| ImageNet-1K | 1.2M images | ViT-L underperforms ResNets |
| ImageNet-21K | 14.2M images | ViT-L ≈ ViT-B (comparable) |
| JFT-300M | 300M images | ViT-L outperforms all ResNets |
Key findings:
- With ImageNet-1K only, larger ViT models (ViT-L) actually underperform smaller ones (ViT-B), even with regularisation — not enough data
- The full advantage of model scale only emerges with JFT-300M pre-training
- ResNets show better performance on smaller pre-training datasets, but reach a plateau earlier
- ViTs benefit more from larger datasets and eventually surpass ResNets
- For smaller model sizes, hybrids (CNN backbone + Transformer) outperform pure Transformers; the gap vanishes at larger scales
To improve performance on smaller datasets, three regularisation parameters help: weight decay, dropout, and label smoothing.
Example — small-data regime vs. large-data regime: on a modest dataset with only tens of thousands of labeled images, a ResNet often wins because locality and translation equivariance are built in. On web-scale pre-training data, a ViT can learn those priors from data and eventually surpass the CNN.
Attention Maps
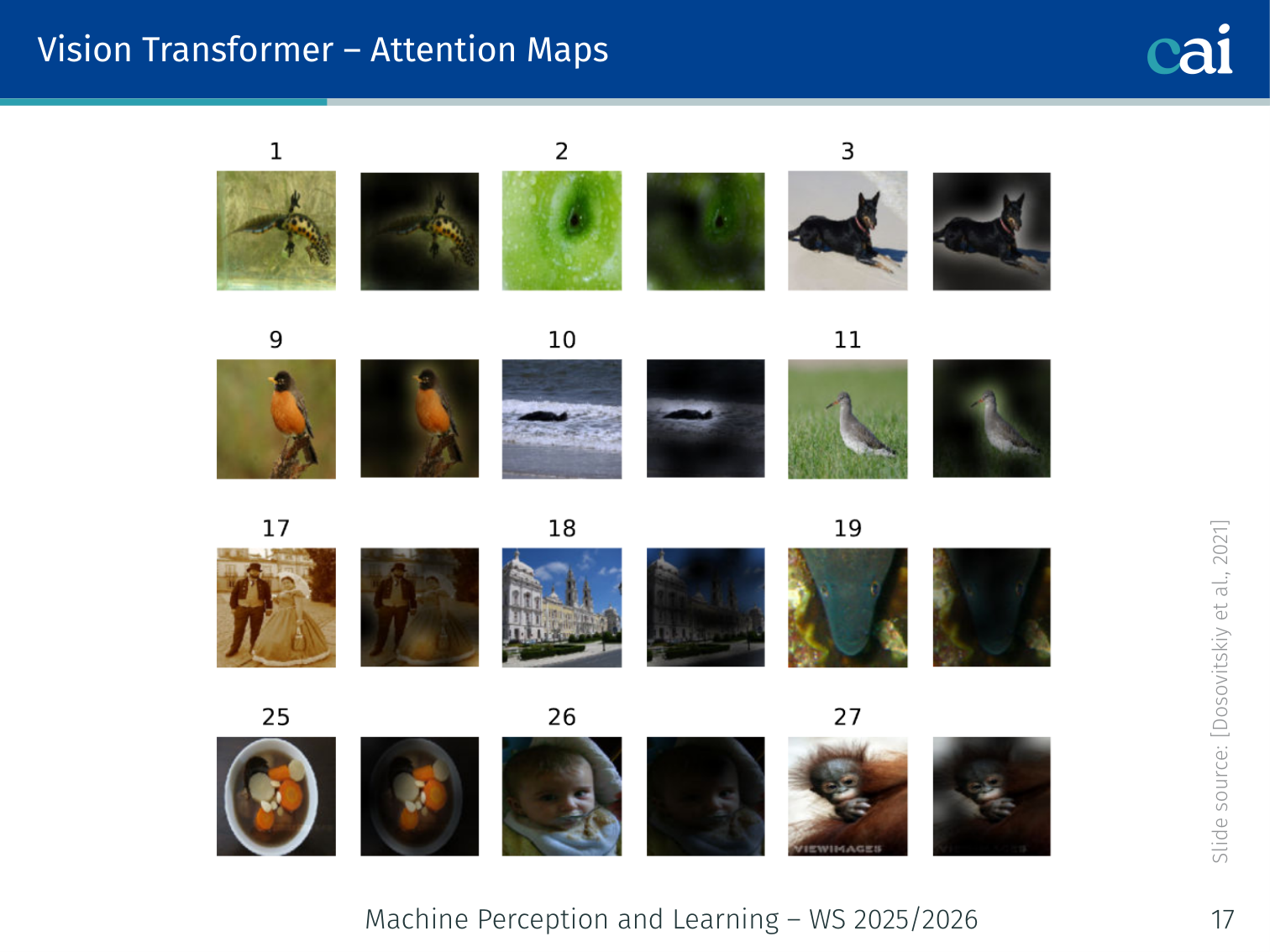
Emergent attention maps in ViT highlighting semantic objects
ViT attention maps reveal what the model “looks at” when classifying an image. Visualization of last-layer [CLS] attention weights shows:
- The model attends to semantically meaningful regions — e.g., in a dog image, the [CLS] token attends to the dog’s face and body while ignoring background
- This emerges without any segmentation supervision — purely from classification training
- Different attention heads focus on different object parts
This is one of the most striking properties of ViT: it independently learns to segment the relevant object through the classification objective alone.
Code: ViT Patch Embedding
import torch
import torch.nn as nn
class PatchEmbedding(nn.Module):
"""Split image into patches and project each to d_model dimensions."""
def __init__(self, img_size=224, patch_size=16, in_channels=3, embed_dim=768):
super().__init__()
self.num_patches = (img_size // patch_size) ** 2
# Conv2d with kernel=stride=patch_size extracts non-overlapping patches
self.proj = nn.Conv2d(in_channels, embed_dim,
kernel_size=patch_size, stride=patch_size)
def forward(self, x):
# x: (B, 3, 224, 224)
x = self.proj(x) # (B, 768, 14, 14)
x = x.flatten(2) # (B, 768, 196)
x = x.transpose(1, 2) # (B, 196, 768)
return x
class SimpleViT(nn.Module):
def __init__(self, img_size=224, patch_size=16, num_classes=1000,
embed_dim=768, depth=12, num_heads=12):
super().__init__()
num_patches = (img_size // patch_size) ** 2
self.patch_embed = PatchEmbedding(img_size, patch_size, 3, embed_dim)
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + 1, embed_dim))
encoder_layer = nn.TransformerEncoderLayer(
d_model=embed_dim, nhead=num_heads,
dim_feedforward=embed_dim * 4, # 4× expansion (3072 for ViT-B)
activation='gelu', # GeLU, not ReLU
batch_first=True
)
self.transformer = nn.TransformerEncoder(encoder_layer, num_layers=depth)
self.norm = nn.LayerNorm(embed_dim)
# MLP head: two layers with GeLU (simplified here to one linear)
self.head = nn.Linear(embed_dim, num_classes)
def forward(self, x):
B = x.shape[0]
x = self.patch_embed(x) # (B, 196, 768)
# Prepend [CLS] token
cls = self.cls_token.expand(B, -1, -1) # (B, 1, 768)
x = torch.cat([cls, x], dim=1) # (B, 197, 768)
x = x + self.pos_embed # add position embeddings
x = self.transformer(x) # (B, 197, 768)
x = self.norm(x)
# Use only the [CLS] token output for classification
cls_out = x[:, 0] # (B, 768)
return self.head(cls_out) # (B, num_classes)
# Example usage
model = SimpleViT(num_classes=1000)
img = torch.randn(4, 3, 224, 224)
logits = model(img) # (4, 1000)Object Detection with ViTs
Recap: CNN-Based Object Detection
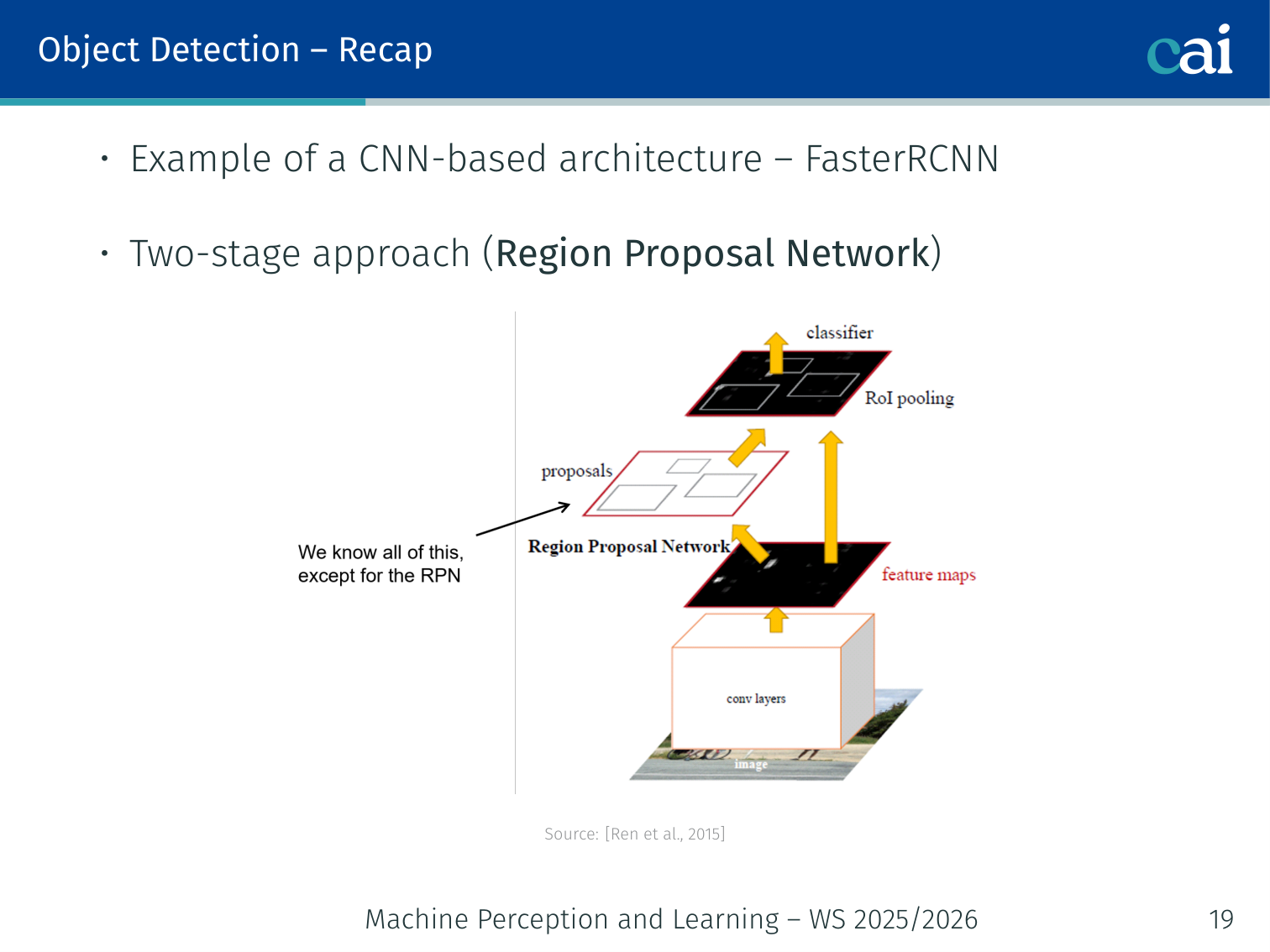
Recap of CNN-based object detection: R-CNN to Faster R-CNN
Object detection requires:
- Localisation: bounding box per instance
- Classification: class label per bounding box (e.g., “cat”, “tv”)
CNN workflow (Faster R-CNN — Ren et al., 2015):
- Region Proposal Network (RPN): generates candidate bounding boxes
- ROI Pooling: extract fixed-size features for each proposed region
- Classification + BBox regression: classify each ROI and refine the box
- Non-Maximum Suppression (NMS): remove duplicate overlapping boxes
- Introduces multi-stage processing and many hand-crafted hyperparameters
DETR — End-to-End Object Detection with Transformers
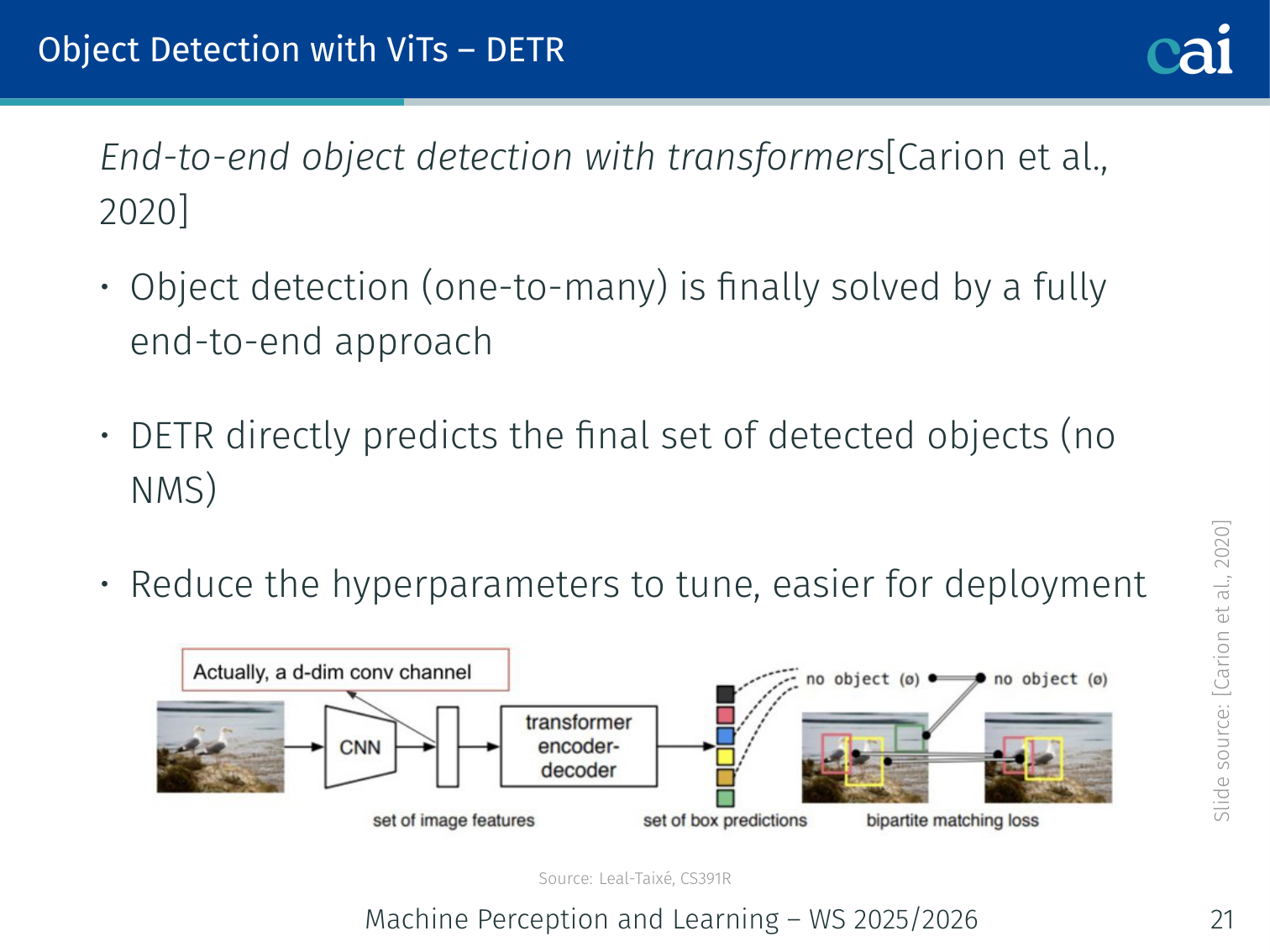
DETR: End-to-end object detection using Transformers
Paper: Carion, Massa, Synnaeve, Usunier, Kirillov, Zagoruyko. “End-to-End Object Detection with Transformers.” ECCV 2020.
Key innovation: DETR is the first fully end-to-end object detector — no RPN, no NMS, no anchor boxes. It directly predicts the final set of detected objects.
Advantages:
- Eliminates hand-crafted components → fewer hyperparameters to tune
- Simpler to deploy
- Naturally handles one-to-many detection via set prediction
DETR Architecture
Image → [CNN Backbone] → feature map (H/32 × W/32 × 2048)
↓ flatten to 1D + positional encoding
H×W sequence of spatial tokens
↓
[Transformer Encoder] — self-attention over all spatial positions
↓
[Transformer Decoder] ← N learnable object queries (e.g. N=100)
↓
N output embeddings
↓ shared FFN per query
N predictions: (class | ∅, bounding box)
Components:
- CNN Backbone: extracts rich spatial features (e.g., ResNet-50); very similar to Faster R-CNN’s backbone
- Positional Encoding: added to the flattened feature map before the encoder
- Transformer Encoder: applies self-attention over all spatial positions — allows the encoder to separate individual instances (the encoder learns to disentangle overlapping objects)
- Object Queries: learnable positional embeddings fed to the decoder. Each query specialises for a different role/location (e.g., query 3 might specialise for large objects on the left)
- Transformer Decoder: cross-attends from object queries to encoder output. Qualitative finding: decoder attention typically focuses on object extremities (legs, heads, tails)
- FFN heads: each query produces either a class prediction + bounding box, or a “no object” () class
vs. “Attention is All You Need”: DETR’s architecture is very similar, with modifications for object detection — mainly the addition of object queries and the set-matching loss.
Optimal Bipartite Matching
Optimal bipartite matching in DETR using the Hungarian algorithm
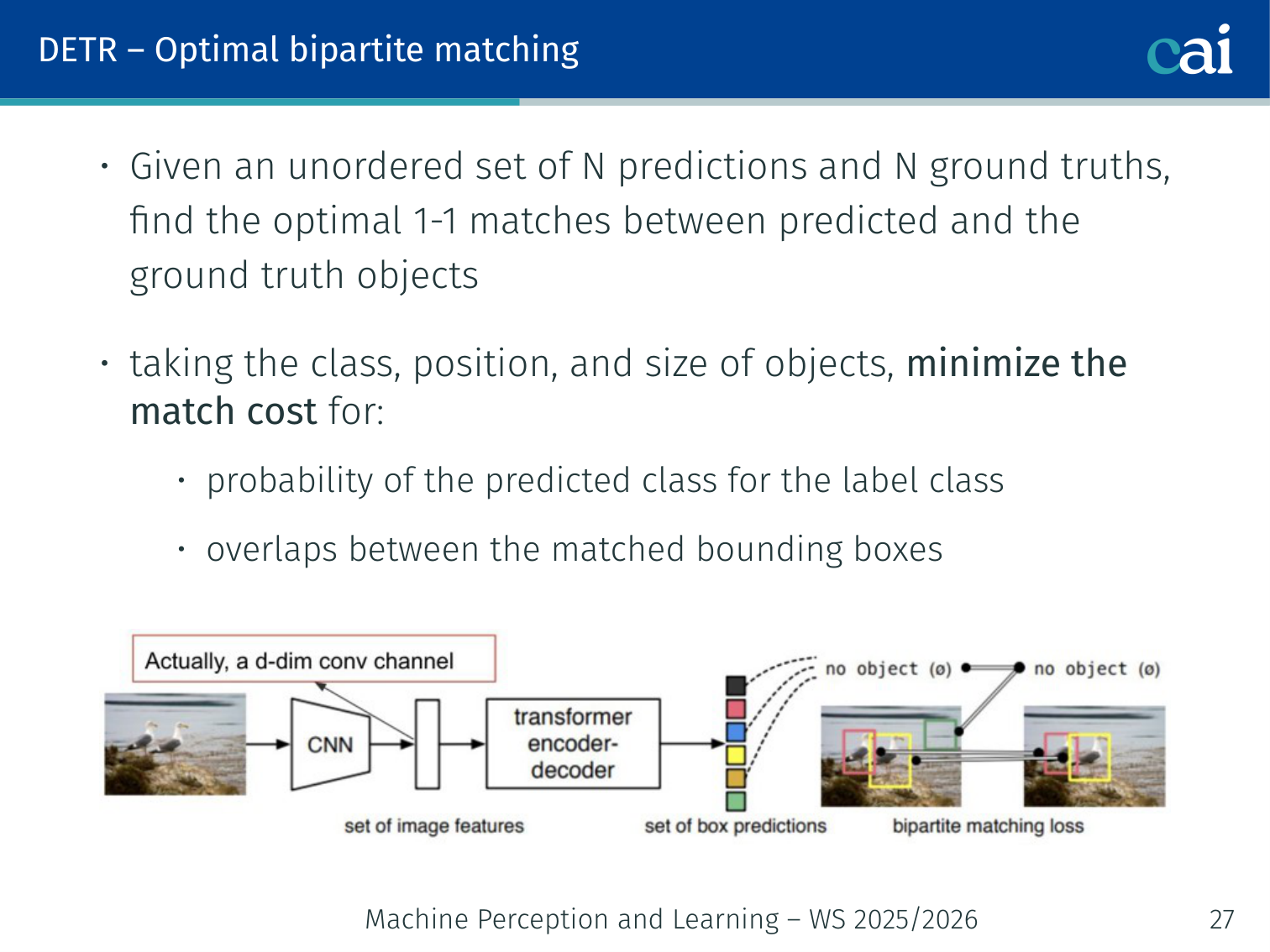
During training, predictions must be matched to the (usually fewer) ground-truth objects. DETR solves this with optimal bipartite matching:
Given an unordered set of predictions and padded ground truth , find the optimal permutation :
The matching cost considers:
- Probability of the predicted class for the true label class
- Overlap between the matched bounding boxes (IoU)
This is solved efficiently using the Hungarian algorithm (also used in Stewart et al. [2016] for people detection in crowded scenes).
Key benefit: unlike NMS, the matching is unique — every ground-truth object is matched to exactly one prediction.
Example — one dog, one bicycle, four queries: suppose an image contains one dog and one bicycle, but DETR outputs four slots:
dog (0.93),bicycle (0.88),dog duplicate (0.81), andempty (0.97). Hungarian matching assigns one slot to the dog and one to the bicycle; the duplicate dog prediction is matched to and explicitly penalized during training.
Combined Loss Function (Hungarian Loss)
DETR Hungarian loss combining classification and box regression
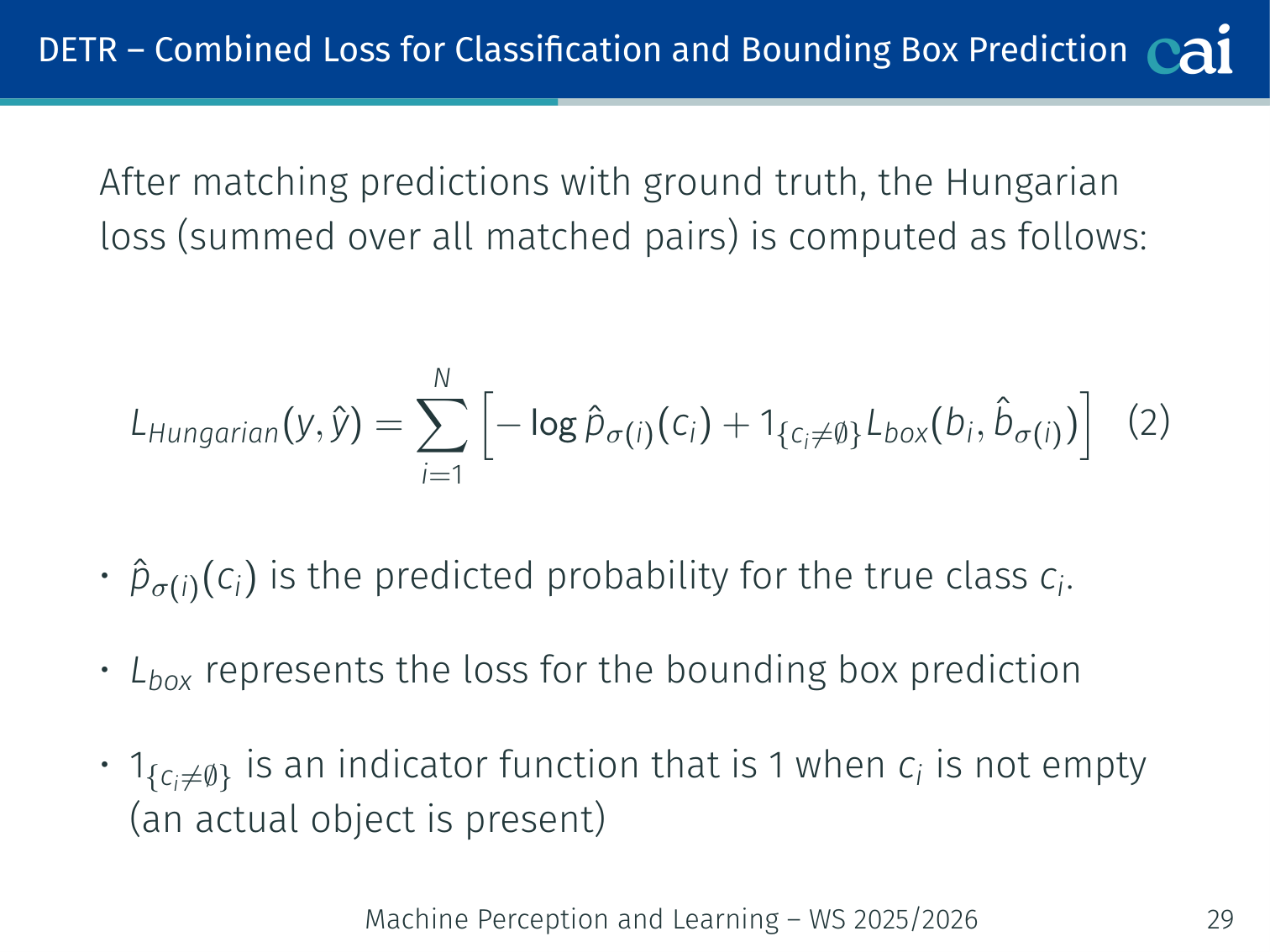
After matching, the loss over all matched pairs:
- : predicted probability for the true class
- : bounding box regression loss (L1 + GIoU)
- : only compute box loss when a real object is present (not for predictions)
Example: if queries but only 3 real objects in the image, 97 predictions are matched to and contribute only classification loss (predicting “no object”).
Panoptic Segmentation
Panoptic segmentation extension for DETR using a mask head
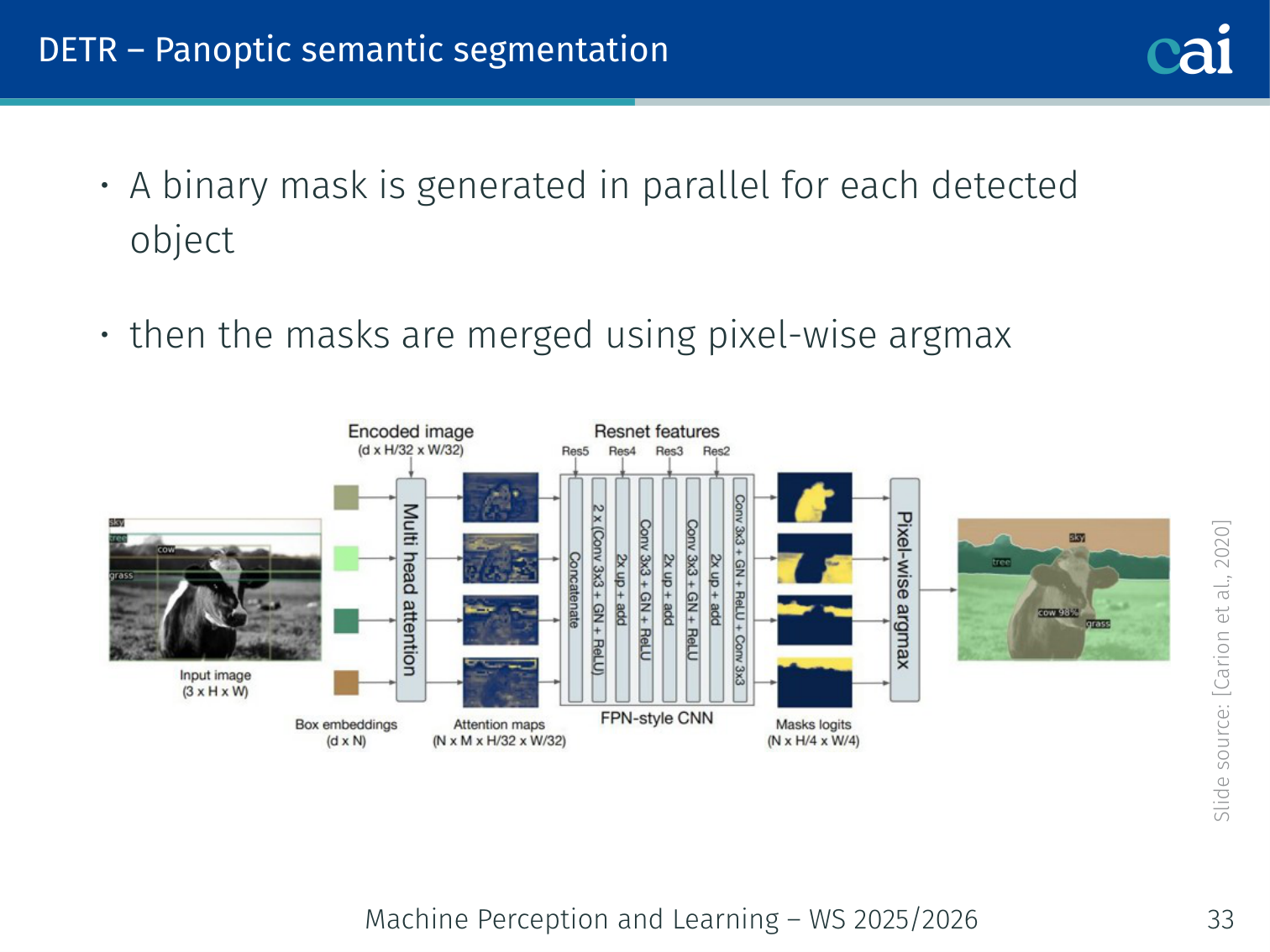
With a minor modification, DETR produces panoptic segmentation (both “things” — countable objects — and “stuff” — amorphous regions like sky, grass):
- Keep the standard DETR detection head
- Add a binary mask head per detected object — generates a mask in parallel
- Merge all masks using pixel-wise argmax
This shows the modularity of the Transformer-based approach — segmentation requires only an additional mask branch.
DETR — Results and Shortcomings
On COCO, DETR is not just conceptually elegant; it is also competitive with strong Faster R-CNN baselines. In the lecture comparison table:
- DETR-R50 reaches 42.0 AP, essentially matching Faster R-CNN-FPN at 42.0 AP
- The strongest DETR variant shown, DETR-DC5-R101, reaches 44.9 AP, 64.7 AP50, and 62.3 AP_L
- The weakness is visible on small objects: AP_S = 23.7, below the stronger Faster R-CNN multi-scale baseline (27.2)
The qualitative slides explain why DETR feels different from proposal-based detectors:
- The encoder can separate nearby instances into different slots even in crowded scenes
- The decoder often attends to object extremities such as heads, legs, and tails rather than box centers, yet still predicts coherent boxes
Shortcomings:
| Problem | Cause |
|---|---|
| Slow convergence | Initially, attention weights are nearly uniform — many epochs needed before queries learn to focus on relevant locations |
| Poor small object detection | Full-resolution attention is — hard to use high-resolution feature maps without prohibitive cost |
Deformable DETR (Zhu et al., 2020)
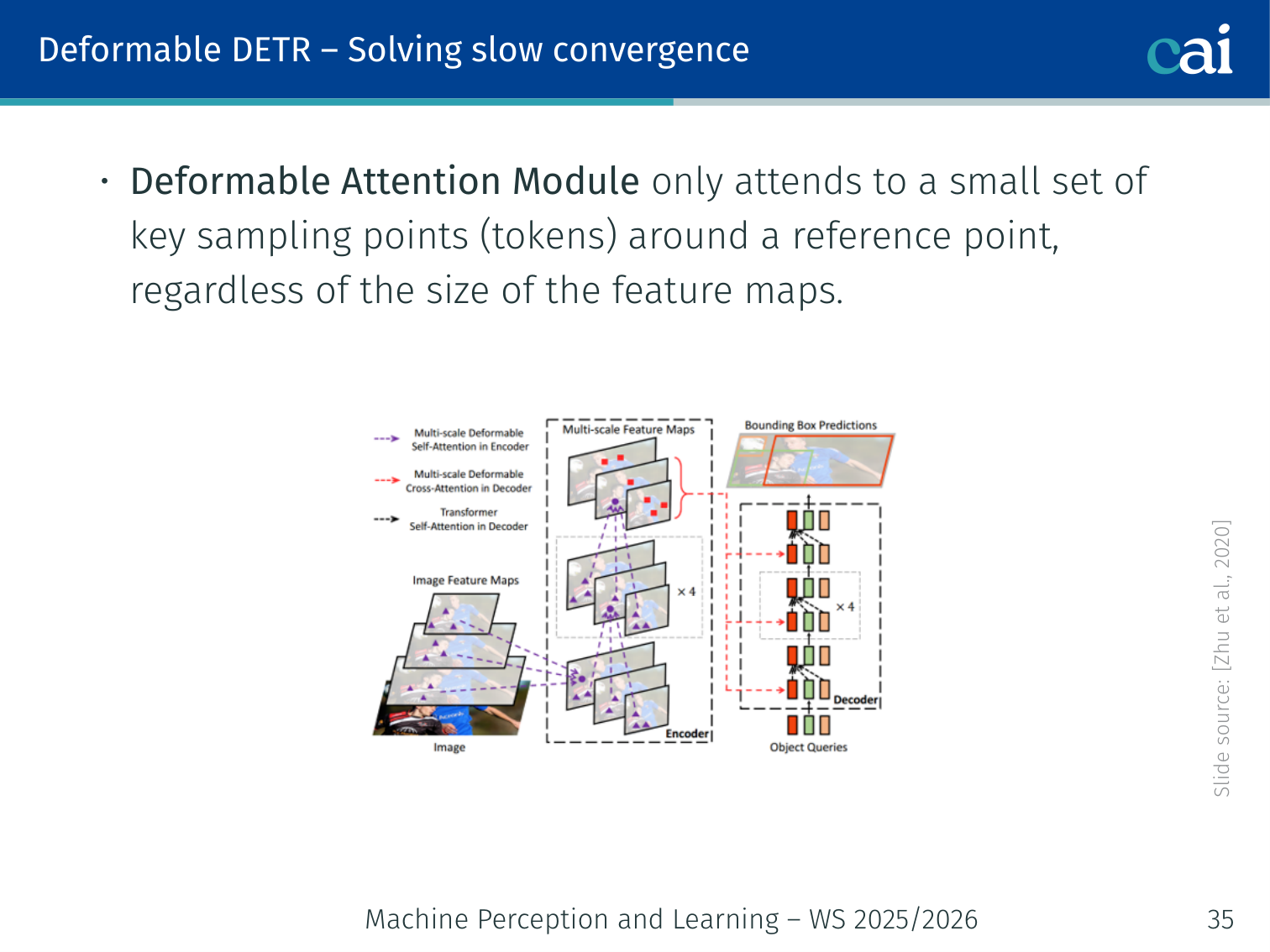
Deformable DETR: sparse attention for faster convergence
Two targeted fixes for DETR’s shortcomings:
1. Deformable Attention Module — solves slow convergence:
- Instead of attending to all spatial tokens, each query attends to only a small set of key sampling points around a reference point (typically 4 per head)
- Cost is dramatically reduced regardless of feature map size
- Attention focuses quickly on relevant locations
2. Multi-scale Deformable Attention — solves small object detection:
- Looks over sampling points from multi-scale feature maps simultaneously (e.g., 1/8, 1/16, 1/32, 1/64 of input resolution)
- Small objects are better represented at finer scales
- Uses CNN-style FPN-like multi-scale features
Result: Deformable DETR converges ~10× faster than DETR and significantly improves small object AP.
Example — far-away traffic sign: in a street scene, a distant stop sign may occupy only a tiny region. Vanilla DETR spreads attention across the whole feature map, so that signal is weak. Deformable DETR samples a handful of relevant points on fine-resolution features near the sign, making the query lock onto it much faster.
# Conceptual: deformable attention samples K points per head
# instead of attending to all H×W positions
# reference_point: (B, Q, 2) — normalized grid coordinates per query
# sampling_offsets: (B, Q, num_heads, K, 2) — learned offsets per head
# attention_weights: (B, Q, num_heads, K) — weights over sampled pointsSelf-supervised Vision Transformers
Motivation
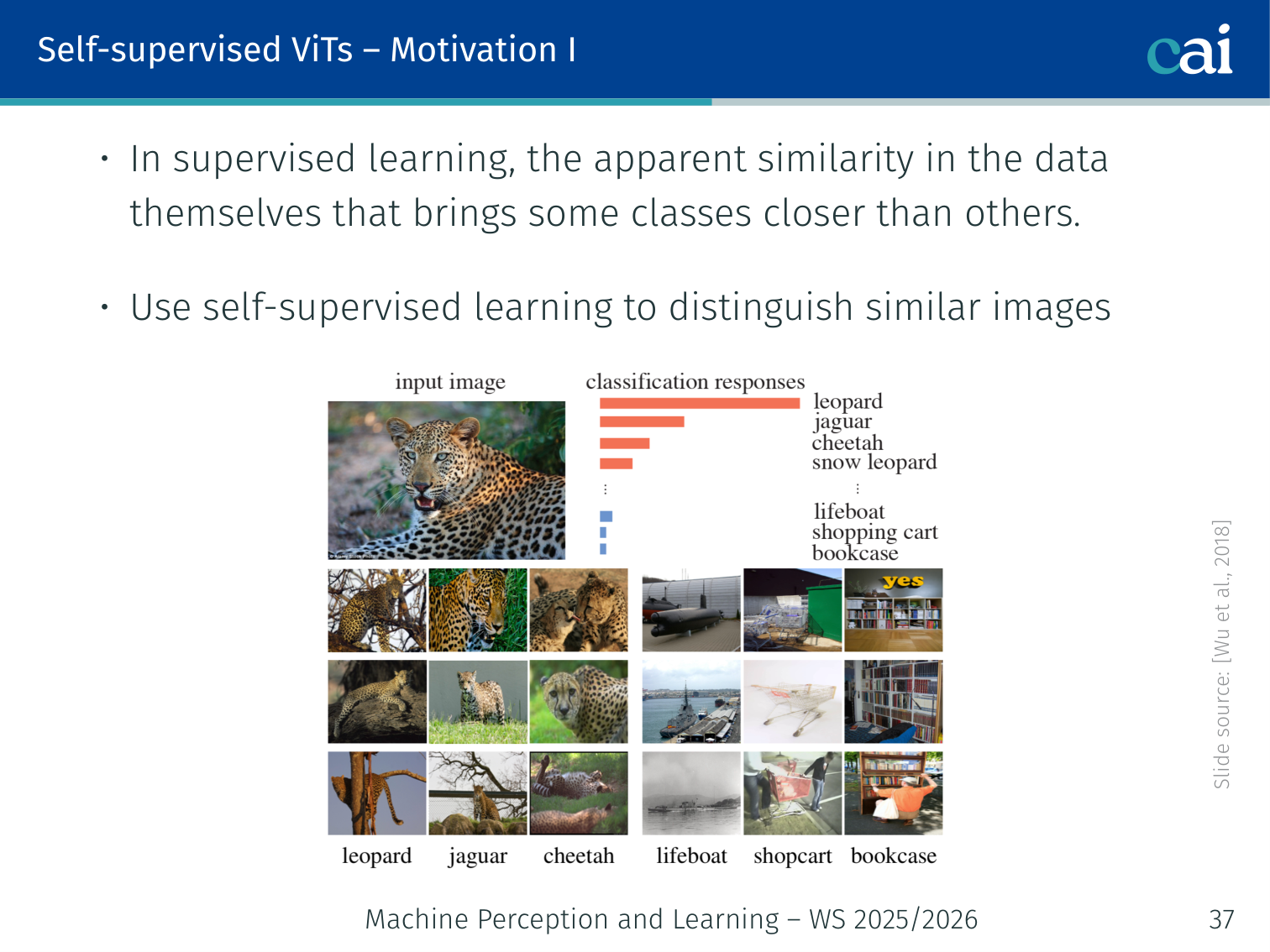
Motivation for self-supervised visual representation learning
Supervised learning challenge: when labeled examples are clustered in feature space by their label, their apparent similarity is determined by the labels themselves — not by genuine visual similarity.
Self-supervised goal: learn representations that distinguish visually similar images even without labels.
Why now? Transformers drove NLP progress through self-supervised learning (BERT, GPT) — can the same approach work for vision? Vision Transformer (ViT, L06) was trained in a fully supervised manner — we want to explore self-supervised alternatives.
Pretext Tasks in NLP
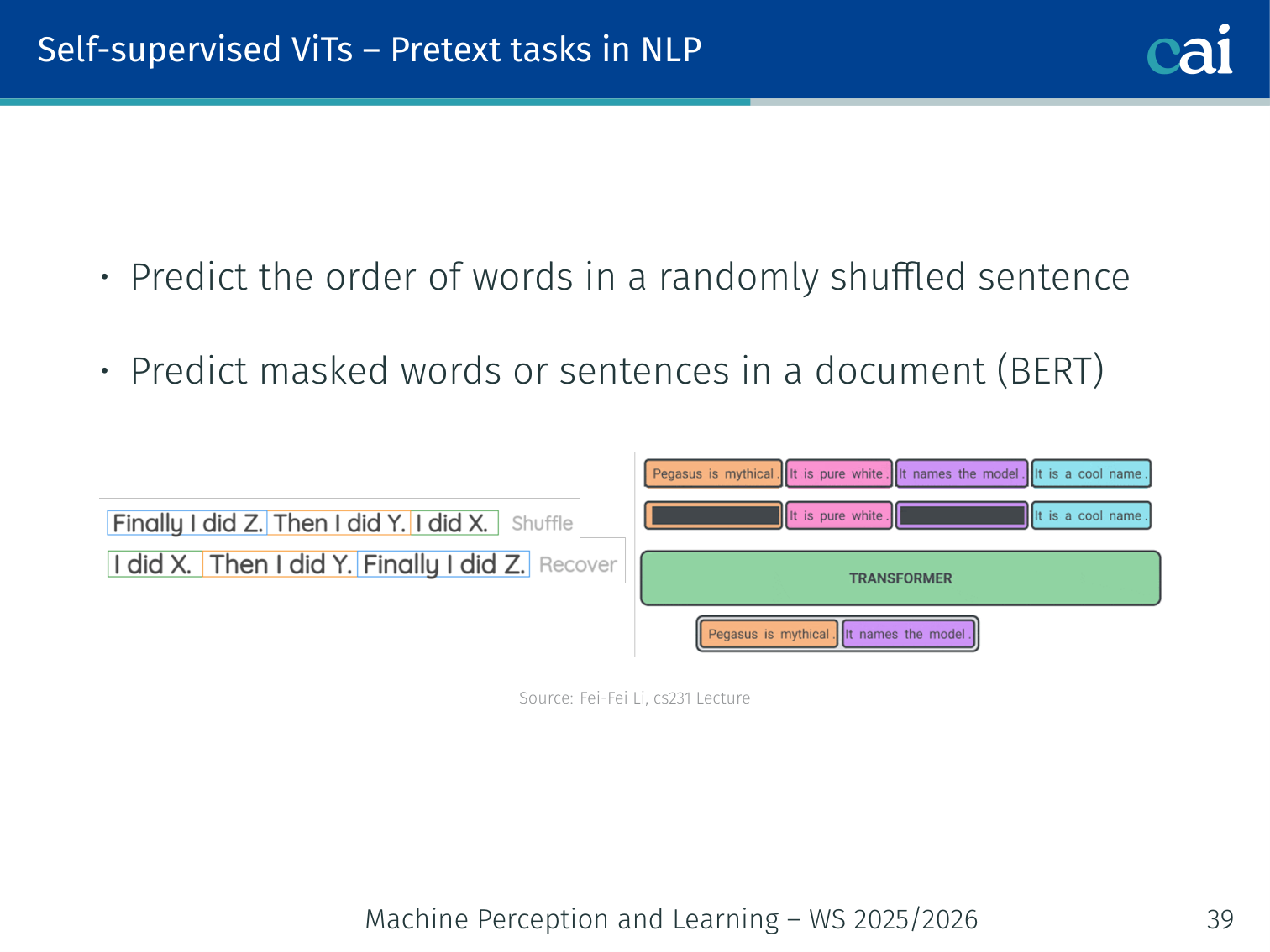
Analogous pretext tasks in NLP: MLM and NSP
Self-supervised learning in NLP defines pretext tasks where labels come automatically from the data:
- BERT (Devlin et al., 2019): predict masked words in a sentence (MLM) + next sentence prediction
- GPT (Radford et al., 2019): language modelling — predict the next word left-to-right
These tasks forced the model to learn rich semantic representations without human annotation.
Pretext Tasks in Computer Vision
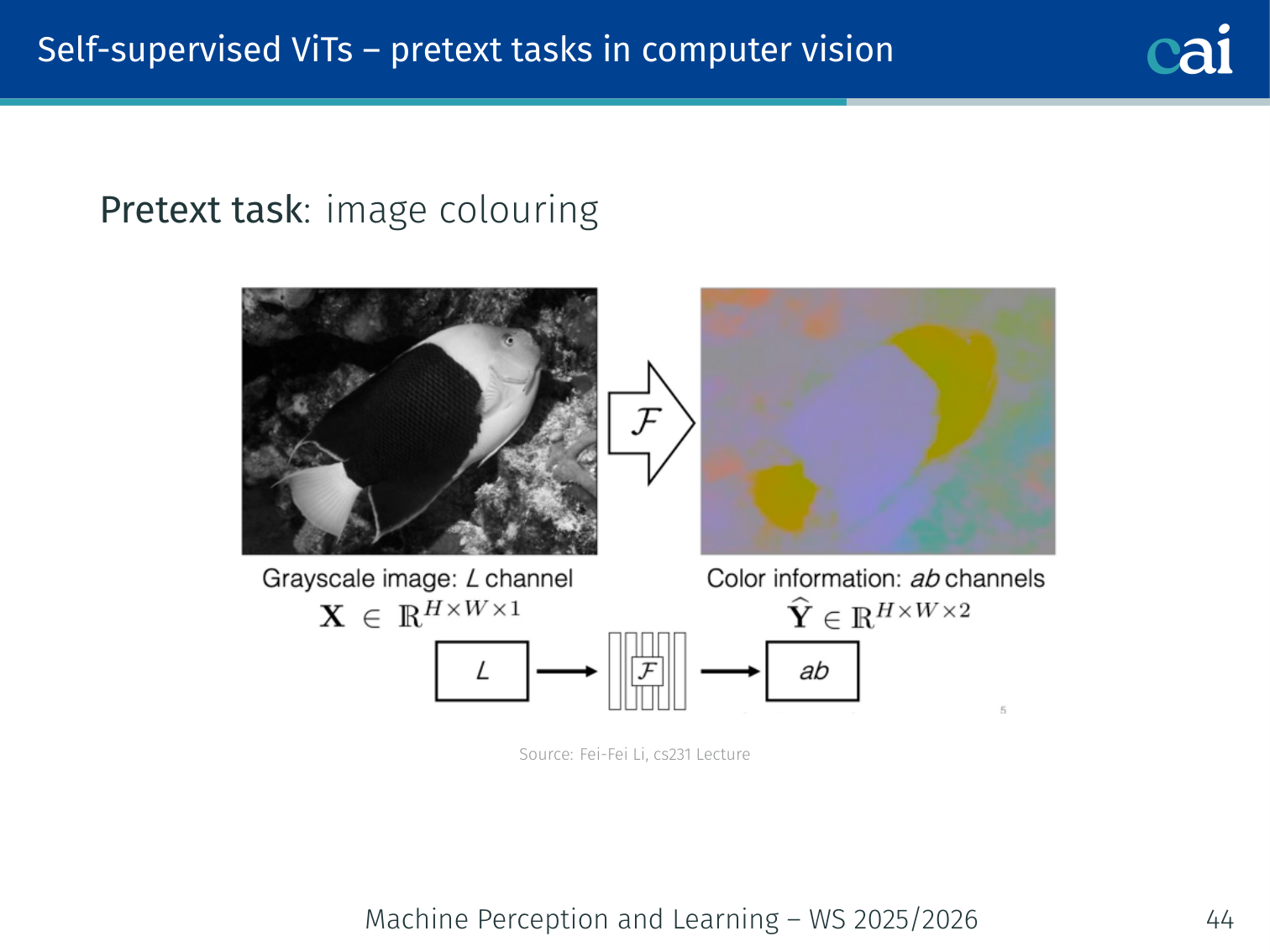
Visual pretext tasks: rotation prediction and jigsaw puzzles
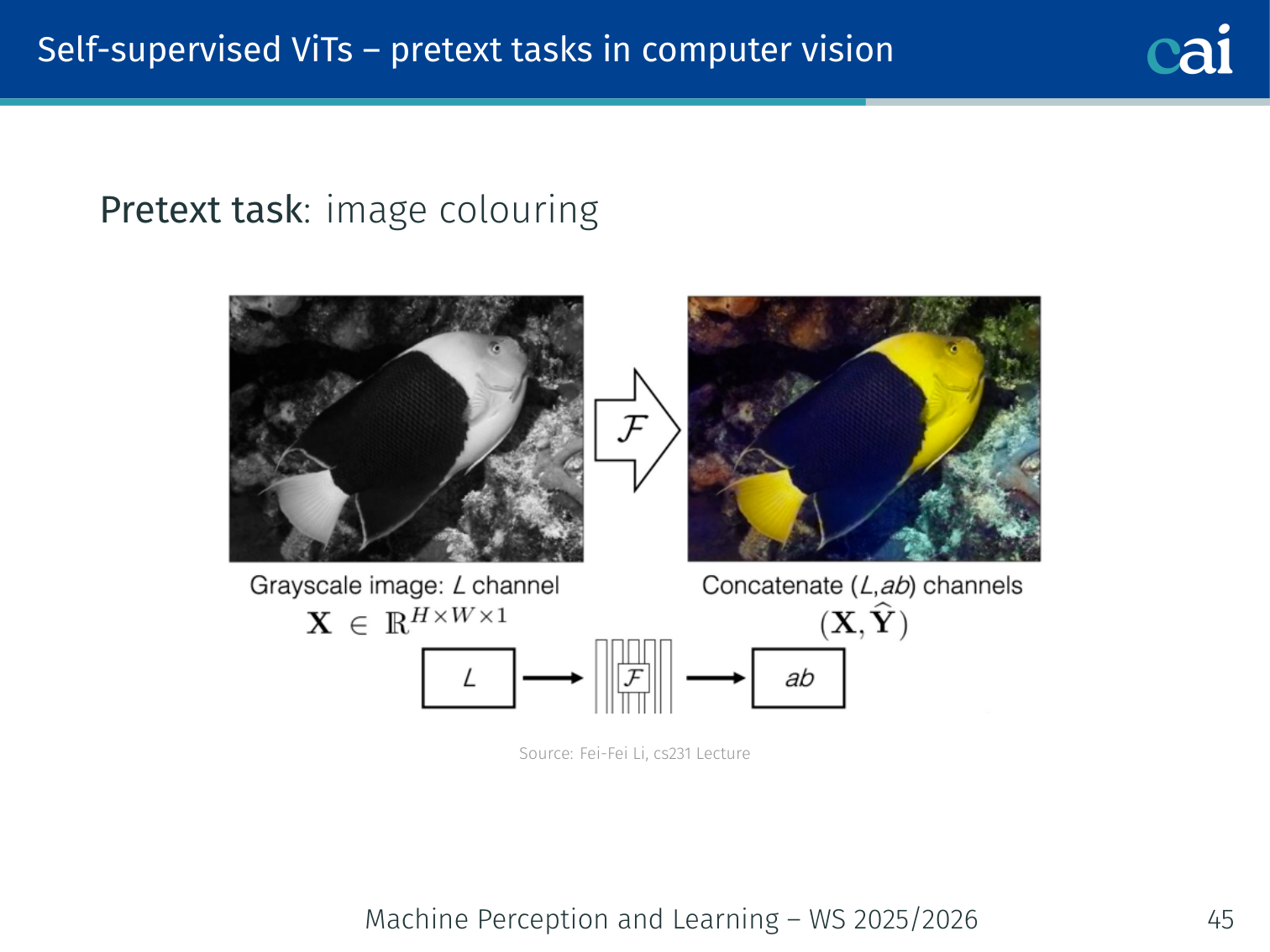
Visual pretext tasks: inpainting and colorization
Many analogous pretext tasks were proposed for vision (Li, cs231):
| Pretext Task | Hypothesis |
|---|---|
| Predict image rotation (0°, 90°, 180°, 270°) | To know the correct orientation, the model must understand what objects “should” look like |
| Predict relative patch location | The model must understand spatial layout and object structure |
| Solve jigsaw puzzles | Shuffled patches require understanding of coherent composition |
| Predict missing pixels (inpainting) | The model must understand context to hallucinate missing regions |
| Image colouring | To colour a grayscale image, the model must understand object semantics (grass is green, sky is blue) |
Problem with pretext tasks: the learned representations may be tied to the specific task. A model trained to predict rotation may learn to detect horizon lines without learning object semantics. The representations don’t necessarily transfer well to downstream tasks.
Self-Supervised Contrastive Learning
Framework for self-supervised contrastive learning
An alternative to pretext tasks: contrastive learning with augmented view pairs.
Idea:
- Take an image and create two different augmented views of the same image → these are positive pairs
- Views of different images → negative pairs
- Minimise the distance between positive pair representations
- Maximise the distance from all negative pair representations
Image x ──augment_1──→ view₁ ──encoder──→ z₁
──augment_2──→ view₂ ──encoder──→ z₂
loss: bring z₁ and z₂ close together, push apart from all z_other
Key question: Do Transformers encode different properties than CNNs under self-supervision?
- Transformers have no built-in locality (no convolutions) → no strong principle of locality is enforced
- Under self-supervision, Transformers may encode scene layout or object boundaries differently
- This motivated DINO (below)
DINO — Self-supervised Vision Transformers
![]()
DINO: Knowledge distillation with no labels in ViTs
Paper: Caron, Touvron, Misra, Jégou, Mairal, Bojanowski, Joulin (2021). “Emerging Properties in Self-Supervised Vision Transformers.” ICCV 2021.
Multi-Crop Strategy
DINO multi-crop strategy: local and global views
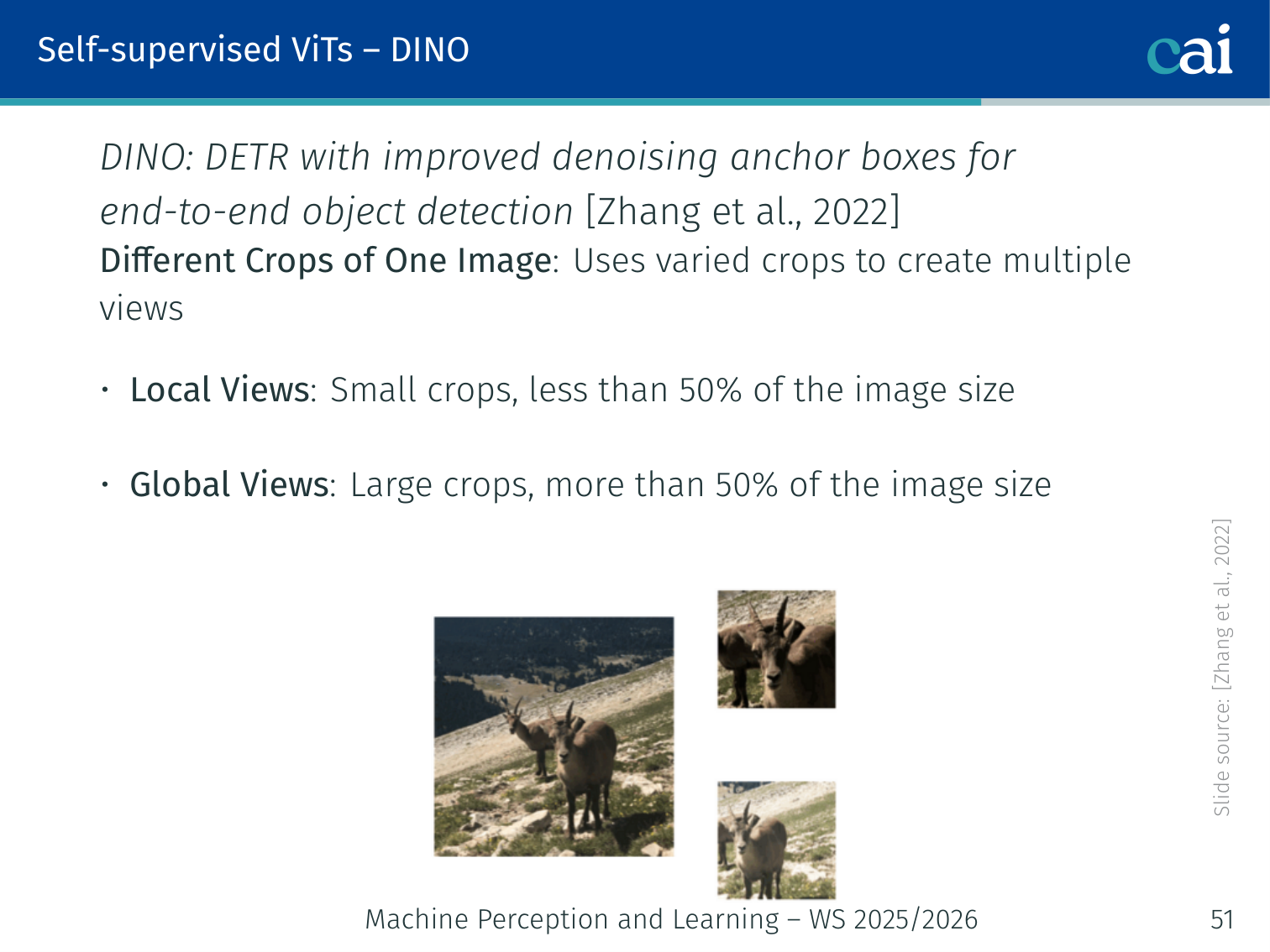
DINO uses different crops of one image to create multiple views:
- Local views: small crops — less than 50% of the image area
- Global views: large crops — more than 50% of the image area
This asymmetry forces the model to learn local-to-global correspondence: the student sees small local patches and must learn to match the global understanding captured by the teacher.
Example — bird image: a local crop may contain only a bird’s wing, while a global crop shows the full bird on a branch. The student must map that wing-only view to the same semantic representation that the teacher produces from the full scene.
Knowledge Distillation: Teacher-Student Framework
Teacher-student distillation framework in DINO
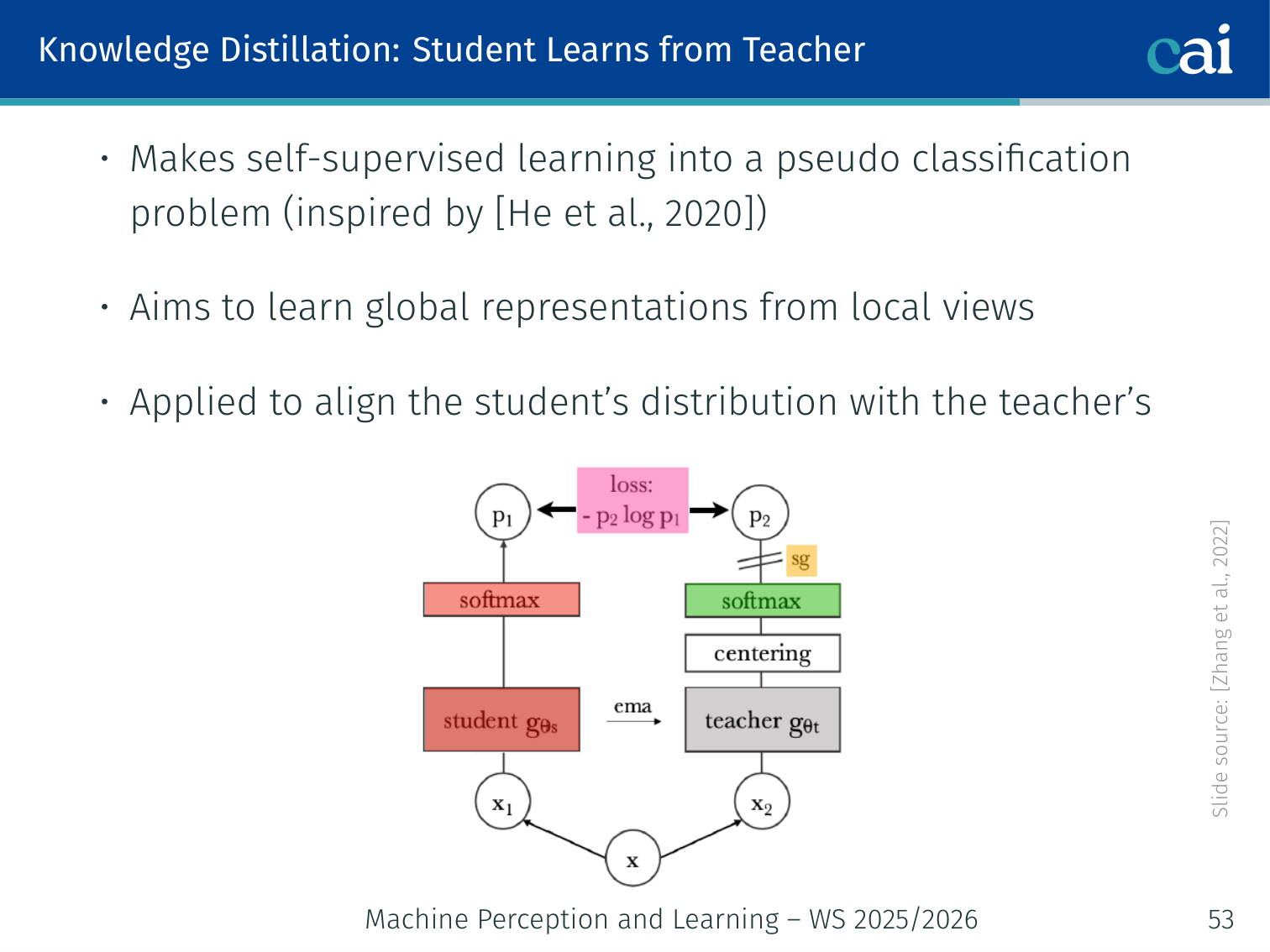
DINO frames self-supervised learning as a pseudo-classification problem via knowledge distillation (inspired by He et al. [MoCo], 2020):
Local view → [Student ViT] → student distribution Pₛ(x)
Global view → [Teacher ViT] → teacher distribution Pₜ(x)
Objective: minimise H(Pₜ(x), Pₛ(x)) ← student learns to match teacher
- Teacher weights = exponential moving average (EMA) of student weights — no gradient flows through the teacher
- The teacher sees only global views; the student sees both global and local views
- This encourages the student to extrapolate from local context to global understanding
Loss Functions
Student distribution (softmax with temperature ):
Teacher distribution (softmax with temperature ):
- , : temperature hyperparameters ( makes the teacher sharper)
- : total number of output features/classes
- , : student and teacher model parameters
Cross-entropy loss (minimised w.r.t. student parameters only):
Multi-view loss (over all crops):
- Only global views are passed to the teacher
- All views (global + local) are passed to the student
Mode Collapse Problem
Visualization of the mode collapse problem in self-supervision
Mode collapse occurs when the model outputs the same distribution for all inputs, making the loss trivially zero:
- The output is identical along all dimensions for any input
- The output is dominated by a single dimension (one feature value is always highest)
Both forms result in learned representations that carry no useful information.
Centering to Prevent Mode Collapse
Centering and sharpening techniques in DINO to prevent collapse
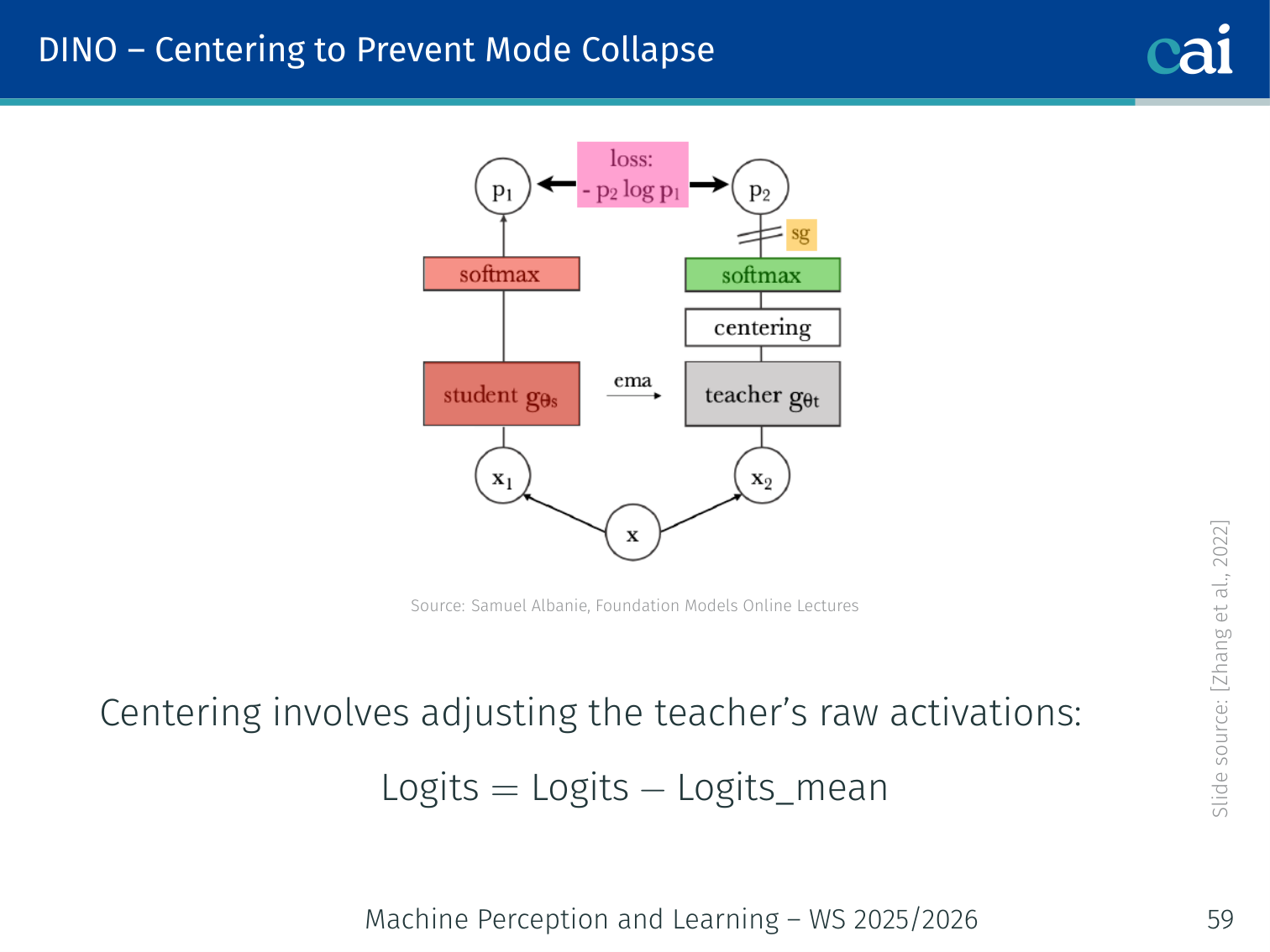
DINO prevents mode collapse with two complementary techniques:
Centering (prevents dimension dominance):
Subtract a running mean from the teacher’s raw activations before the softmax:
- Features that are above their mean become positive → softmax assigns high probability
- Features below their mean become negative → softmax assigns low probability
- Prevents any single feature from always dominating by centering the range
Sharpening (prevents uniform outputs):
- Use a low teacher temperature → sharper, more confident teacher distribution
- Forces the student to commit to specific features rather than predicting a uniform distribution
Together: centering prevents one dimension from always winning; sharpening prevents everything from being equally likely.
# Conceptual DINO training loop
import torch
import torch.nn.functional as F
def dino_loss(student_out, teacher_out, tau_s=0.1, tau_t=0.04, center=None):
# Center the teacher output to prevent mode collapse
teacher_out = teacher_out - center # subtract running mean
# Compute distributions
s = F.softmax(student_out / tau_s, dim=-1)
t = F.softmax(teacher_out / tau_t, dim=-1)
# Cross-entropy: student learns to match teacher
loss = -(t * torch.log(s + 1e-8)).sum(dim=-1).mean()
return loss
# Teacher is updated via EMA of student weights (no gradient)
# for param_t, param_s in zip(teacher.parameters(), student.parameters()):
# param_t.data = momentum * param_t.data + (1 - momentum) * param_s.dataResults
DINO is very effective for Transformer backbones:
- On ResNet-50, DINO is already competitive with the best CNN self-supervised baselines in the lecture table: 75.3 linear-eval accuracy and 67.5 -NN accuracy
- On ViT-S, the gains are clearer: DINO reaches 77.0 linear accuracy and 74.5 -NN, outperforming BYOL, MoCov2, and SwAV on the same Transformer backbone
- Self-supervised ViTs develop explicit semantic segmentation maps in their last-layer attention — clear foreground/background separation with no segmentation labels
- -NN classification on ImageNet without fine-tuning achieves strong accuracy, demonstrating the quality of learned representations
- Attention maps are semantically interpretable: the model identifies object boundaries and scene structure for objects such as birds, boats, bicycles, giraffes, dogs, and even large scene regions like skylines
- DINO features transfer well across datasets and tasks
Example — emergent segmentation without labels: for a dog standing on grass, the last-layer DINO attention often highlights the dog’s body as one coherent region while downweighting the background, even though the model never saw a segmentation mask during training.
These properties do not emerge as strongly in CNN-based self-supervised models — the inductive biases of Transformers (global attention, no forced locality) appear to be key.
DINO became the foundation for DINOv2, SAM (Segment Anything Model), and other prominent vision foundation models.
The Field is Evolving Quickly
Summary of the rapid evolution in vision and language models
From the lecture’s closing slide — notable models and frameworks as of WS 2025/2026:
- Backbone models: Swin, MoCov3, DINOv2
- Detection: YOLOv10, DINO (detection variant), Deformable DETR
- Vision-Language: LLaVA, ViLT, CLIP, BLIP, Qwen
- Language: LLaMA, GPT-5, Mamba
- Generative: Stable Diffusion, DALL-E, Sora, WAN
Summary
| Topic | Key Points |
|---|---|
| CNN limitations | Brittle to certain distribution shifts; Transformers show better robustness but need explicit position encoding |
| Stand-alone self-attention | Can replace convolution; relative position embedding captures spatial structure |
| ViT | 16×16 patches as tokens; [CLS] for classification; GeLU MLP head; needs large data (JFT-300M > ImageNet-21K > ImageNet-1K) |
| ViT data scaling | ResNets better on small datasets; ViT surpasses at JFT-300M scale |
| DETR | CNN backbone + Transformer encoder/decoder; object queries; Hungarian matching; no NMS; slow convergence, poor small objects |
| Deformable DETR | Sparse deformable attention + multi-scale features; solves DETR’s shortcomings |
| Pretext tasks | Rotation, jigsaw, inpainting, colouring — but representations tied to task |
| Contrastive learning | Positive (same image, different augmentations) vs negative pairs; minimize/maximize distance |
| DINO | Teacher (EMA) + student; global views to teacher only; local-to-global correspondence; centering + sharpening prevents mode collapse; emergent segmentation |
References
- Carion, Massa, Synnaeve, Usunier, Kirillov, Zagoruyko (2020) — End-to-end object detection with transformers. ECCV, pp. 213–229.
- Dosovitskiy et al. (2021) — An image is worth 16×16 words: Transformers for image recognition at scale. arXiv:2010.11929.
- He, Fan, Wu, Xie, Girshick (2020) — Momentum contrast for unsupervised visual representation learning. CVPR, pp. 9729–9738.
- Naseer, Ranasinghe, Khan et al. (2021) — Intriguing properties of vision transformers. NeurIPS, 34:23296–23308.
- Ramachandran, Parmar, Vaswani, Bello, Levskaya, Shlens (2019) — Stand-alone self-attention in vision models. arXiv:1906.05909.
- Ren, He, Girshick, Sun (2015) — Faster R-CNN: Towards real-time object detection with region proposal networks. NeurIPS, 28:91–99.
- Stewart, Andriluka, Ng (2016) — End-to-end people detection in crowded scenes. CVPR, pp. 2325–2333.
- Wu, Xiong, Yu, Lin (2018) — Unsupervised feature learning via non-parametric instance discrimination. CVPR, pp. 3733–3742.
- Caron, Touvron, Misra, Jégou, Mairal, Bojanowski, Joulin (2021) — Emerging properties in self-supervised vision transformers. ICCV.
- Zhu, Su, Lu, Li, Wang, Dai (2020) — Deformable DETR: Deformable transformers for end-to-end object detection. arXiv:2010.04159.
Applied Exam Focus
- Patch Projection: ViT treats an image as a sequence of patches, effectively turning a Vision problem into an NLP problem.
- Inductive Bias: ViT has less inductive bias than CNNs (no translation invariance or locality). This means it requires much more data to outperform CNNs.
- Hybrid Models: Often use a CNN backbone to extract features before passing them to a Transformer for global reasoning.
Previous: L05 — Transformers | Back to MPL Index | Next: (y-07) Multimodal | (y) Return to Notes | (y) Return to Home