Previous: L09 — VAE | Back to MPL Index | Next: (y-11) RL
University of Stuttgart — Machine Perception and Learning for Collaborative Intelligent Systems, Prof. Dr. Andreas Bulling, WS 2025/2026
Mental Model First
- GANs learn to generate data through a game between a generator and a discriminator.
- The discriminator acts like a learned training signal for realism, which is why GANs can produce very sharp samples.
- The hard part is optimization: two networks are changing at once, so stability matters as much as model capacity.
- If one question guides this lecture, let it be: how can a model learn to sample realistic data without ever writing down an explicit density?
VAE Recap
A quick recap of VAEs and their probabilistic bits.
- VAEs are a probabilistic version of autoencoders that allow sampling to generate new, unseen samples.
- A prior is placed on the latent code:
- The decoder learns where and are neural networks.
- The intractable density is:
- Since this can’t be optimised directly, we derive and optimise a lower bound (ELBO) on the likelihood.
Summary of VAEs
A summary of VAEs: easy to train, but there's a tradeoff with image quality.
| Property | VAE |
|---|---|
| Training | Relatively easier |
| Inference | Explicit inference network |
| Image quality | More blurry (due to reconstruction loss) |
| Density | Explicit but intractable |
Motivation: From Explicit to Implicit Density
Why we're moving from explicit density models to implicit sampling with GANs.
What if we give up on explicitly modelling the density, and just want the ability to sample?
High-dimensional is:
- Difficult to evaluate and optimise
- A high may not correspond to visually realistic samples
This motivates implicit density models — we don’t write down at all. We only care about samples.
The Two-Sample Test Intuition

The two-sample test: can you tell the real samples from the generated ones?
The core question GANs are built on: Given two finite sets of samples, how can we tell if they come from the same distribution?
- — real data
- — model samples
We set up a hypothesis test:
- Null hypothesis : (distributions are the same)
- Alternate hypothesis :
The test statistic compares and in terms of means and variance. If , we accept .
Key observation: The test statistic is likelihood-free — it only uses samples, not the densities or directly.
The GAN Idea
The core of GANs: learning to transform noise z into data samples x.
Instead of hand-designing a test statistic, learn one:
Train the generative model to minimise a two-sample test objective between and .
Finding a two-sample test objective in high dimensions is hard, so we:
- Sample from a simple distribution (e.g., Gaussian noise)
- Learn a transformation using a neural network
- Use another neural network to learn the test statistic
💡 Intuition: The Counterfeiter and the Detective
The GAN is a two-player game between:
- The Generator (The Counterfeiter): Their goal is to create fake banknotes that are so good, nobody can tell they aren’t real. They never see real money; they only hear from the detective whether their latest batch was caught.
- The Discriminator (The Detective): Their goal is to look at a banknote and decide if it’s real or fake. They study real money to learn what it looks like, and then try to catch the counterfeiter.
As the detective gets better at spotting flaws, the counterfeiter is forced to fix those specific flaws. Eventually, the fakes become indistinguishable from the real thing.
🧠 Deep Dive: Mode Collapse (The “Easy Way Out”)
Imagine the counterfeiter discovers that the detective is currently very bad at spotting fake €10 bills, but very good at spotting €50 bills.
Instead of trying to learn how to make all types of money, the counterfeiter might decide to only make €10 bills. Even if they produce millions of identical €10 bills, they are “winning” the game because the detective is fooled.
In Machine Learning: A GAN trained on cats and dogs might “collapse” and only produce one specific, high-quality image of a cat. It has “solved” the problem of fooling the discriminator, but it has failed at its true goal: learning the full diversity of the data distribution.
The Adversarial Framework
The GAN architecture: a generator and a discriminator in a constant battle.
Two neural networks compete in a minimax game (Goodfellow et al., 2014):
| Network | Role | Goal |
|---|---|---|
| Generator | Transforms noise into fake samples | Fool the discriminator — support |
| Discriminator | Classifies real vs. fake samples | Distinguish — support |
Noise z ~ p_z ──→ [Generator G] ──→ fake x̂
│
Real data x ~ p_data ──────────────→ [Discriminator D] ──→ Real (1) / Fake (0)
The generator never sees real data directly — it only receives feedback through the discriminator’s gradient.
Example intuition — a counterfeiter and a police detective:
- The counterfeiter (G) makes fake banknotes and tries to pass them off as real.
- The detective (D) examines banknotes and tries to identify fakes.
- As the detective gets better, the counterfeiter is forced to improve. Eventually, the fakes become indistinguishable from real notes.
Training Objectives
Discriminator Objective
The discriminator's goal: get as good as possible at spotting real vs. fake data.
The discriminator performs binary classification — real samples get label 1, fake samples get label 0:
This is a standard binary cross-entropy loss. For a fixed generator , the optimal discriminator is:
Example: if at a given point , half the density is real and half is fake, the optimal discriminator outputs — it cannot do better than chance there.
Generator Objective
The generator minimises the same quantity — it wants the discriminator to fail:
Combined Minimax Objective
Connection to Jensen-Shannon Divergence
Substituting the optimal discriminator into the objective:
So the vanilla GAN objective is equivalent to minimising the Jensen-Shannon Divergence between the data and generator distributions.
The Jensen-Shannon Divergence (also called symmetric KL):
Properties:
- (symmetric)
- satisfies the triangle inequality (Jensen-Shannon distance)
Training in Practice
Alternating Optimisation
Training alternates between gradient steps on and :
Step 1 — Gradient ascent on D (maximise ):
Step 2 — Gradient descent on G (minimise ):
The Gradient Problem
The vanishing gradient problem in the standard GAN setup.
Minimising causes a vanishing gradient early in training:
- When the fake sample is easily detected (likely at the start), , so .
- The gradient in this region is flat — the generator receives almost no learning signal exactly when it needs it most.
The Non-Saturating Fix (Standard in Practice)
Fixing the generator objective so it gets better gradients early on.
Instead of minimising , maximise :
Same objective (fool the discriminator), but the gradient is large when the sample is bad — exactly where we need it. This heuristic is standard in virtually all GAN implementations.
Training Loop (PyTorch)
for real_batch in dataloader:
batch_size = real_batch.size(0)
# ── 1. Train Discriminator (k steps) ──────────────────────────
for _ in range(k):
z = torch.randn(batch_size, latent_dim)
fake = G(z).detach() # stop gradient flowing to G
real_loss = bce(D(real_batch), torch.ones(batch_size, 1))
fake_loss = bce(D(fake), torch.zeros(batch_size, 1))
d_loss = (real_loss + fake_loss) / 2
optimizer_D.zero_grad()
d_loss.backward()
optimizer_D.step()
# ── 2. Train Generator (non-saturating objective) ─────────────
z = torch.randn(batch_size, latent_dim)
# We WANT D to output 1 (real) for generated samples
g_loss = bce(D(G(z)), torch.ones(batch_size, 1))
optimizer_G.zero_grad()
g_loss.backward()
optimizer_G.step()Note: Some implementations use (one D step per G step), others use . There is no universally best rule; it depends on the dataset and architecture.
Issues
1. Training Instability (Nash Equilibrium)
GAN training is unstable—it's tough to find that perfect Nash equilibrium.
GAN training is a two-player game. Finding a Nash equilibrium is hard: making downhill progress for one player may push the other player uphill.
Additionally, the generator can learn to exploit statistical properties of the discriminator, producing samples that fooled the discriminator but are not actually realistic.
2. Mode Collapse
Mode collapse: when the generator just keeps making the same few things.
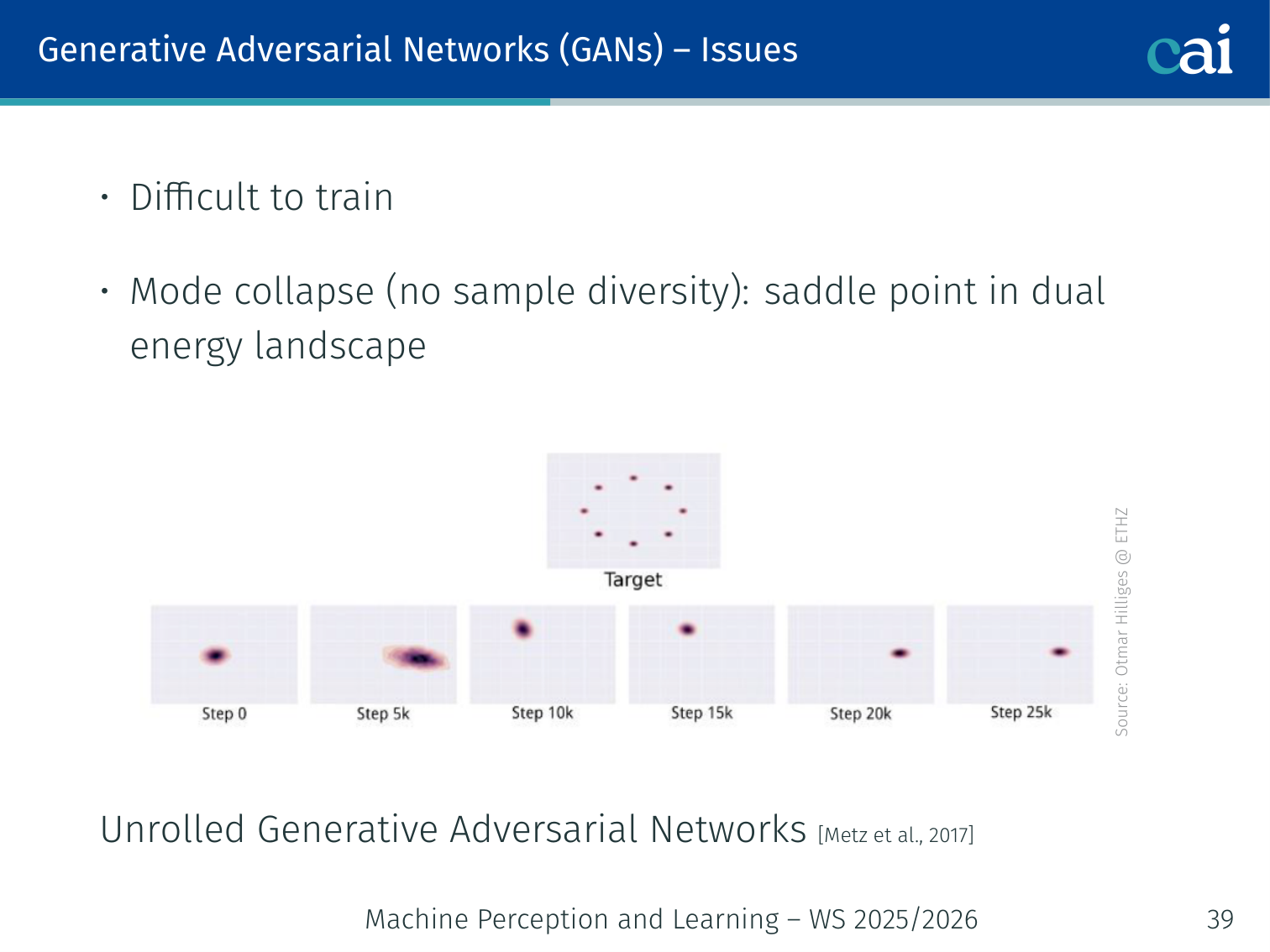
Mode collapse: the generator produces only a small number of outputs (modes) that fool the discriminator, ignoring most of the real data distribution.
Example: A GAN trained on a dataset of handwritten digits (MNIST) might latch onto only “1”s and “3”s because those were easiest to fool the current discriminator, completely ignoring “0”, “2”, “4”–“9”.
Illustrated by a “saddle point in dual energy landscape” — the generator finds a local mode and the discriminator cannot push it away.
Solutions:
- Unrolled GAN (Metz et al., 2017): the generator optimises against a “future” discriminator by unrolling several discriminator update steps.
- Mini-batch discrimination: the discriminator sees entire batches, penalising low sample diversity.
- Wasserstein GAN: different loss that avoids the problem fundamentally (see below).
GANs vs VAEs
Comparing VAEs and GANs: training, quality, and how we evaluate density.
| Property | VAE | GAN |
|---|---|---|
| Training | Relatively easier | Requires many optimisation tricks, prone to mode collapse |
| Inference | Explicit | Implicit (no encoder; unless BiGAN) |
| Image quality | Blurrier (reconstruction loss) | Sharper (discriminator signal) |
| Density evaluation | Lower bound via ELBO | Not possible — likelihood-free |
Issues with Jensen-Shannon Divergence
Why Jensen-Shannon Divergence fails when distributions don't overlap.
The JSD-based GAN objective has two serious problems:
- JSD correlates poorly with sample quality — you don’t know when to stop training.
- Gradient vanishing from an optimal discriminator: If becomes too good, saturates to — a constant — and the generator receives zero gradient.
More fundamentally: if and have non-overlapping supports (common when the data lies on a low-dimensional manifold of a high-dimensional space), the KL divergence is undefined or infinite, and gradients are not continuous or well-behaved.
Note: The GAN objective can be generalised to an entire family of divergences via f-GAN (Nowozin et al., 2016): Training Generative Neural Samplers using Variational Divergence Minimization.
Wasserstein Distance and WGAN
Wasserstein distance: a much more stable objective for training GANs.
Comparing gradients: JSD vs. Wasserstein distance when things are disjoint.
Arjovsky et al., 2017
Earth Mover’s Distance
Visualizing Earth Mover's Distance as the cost of optimal transport between distributions
Intuition for Wasserstein distance using the earth mover's analogy for sand piles
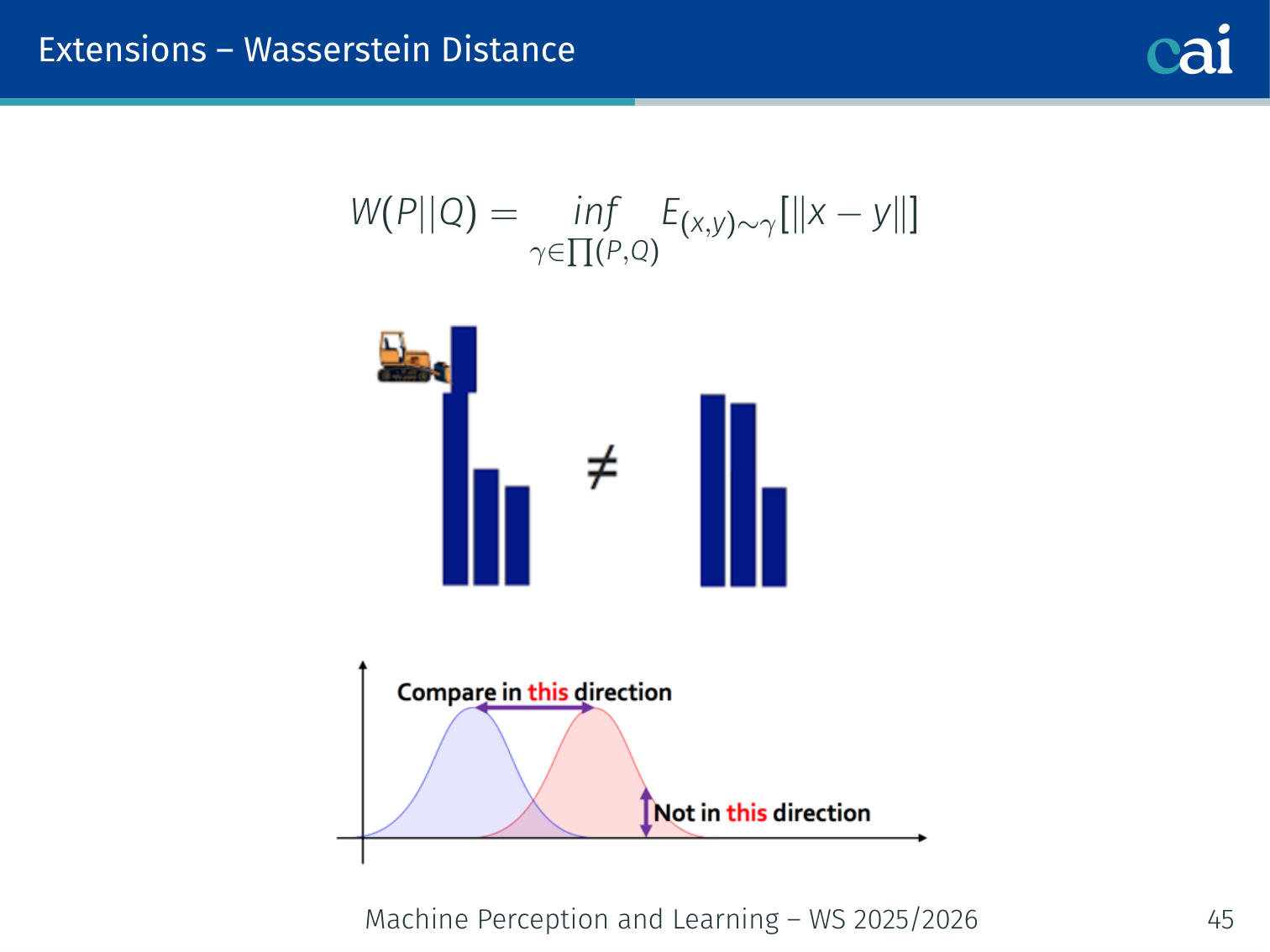
Instead of JSD, use the Wasserstein-1 (Earth Mover’s) Distance:
Where is the set of all joint distributions whose marginals are and .
Intuition: the minimum “work” needed to transport a pile of dirt shaped like to a pile shaped like . Think of two piles of sand — the Wasserstein distance is the cost of moving sand optimally from one pile’s shape to the other’s.
Why it’s better than JSD:
- Well-defined even when distributions have disjoint support
- Continuous and differentiable everywhere — the generator always gets a useful gradient proportional to how far apart the distributions are
WGAN Objective
By the Kantorovich-Rubinstein duality, the Wasserstein distance can be computed as:
The discriminator is now called a critic (no sigmoid at the output) and must be 1-Lipschitz (enforced by gradient penalty in WGAN-GP, or weight clipping in the original paper).
# WGAN-GP critic loss
def critic_loss(real, fake, critic, gp_weight=10):
real_score = critic(real).mean()
fake_score = critic(fake).mean()
# Gradient penalty (enforce 1-Lipschitz constraint)
alpha = torch.rand(real.size(0), 1, 1, 1).to(real.device)
interp = (alpha * real + (1 - alpha) * fake).requires_grad_(True)
interp_score = critic(interp)
grads = torch.autograd.grad(interp_score, interp,
grad_outputs=torch.ones_like(interp_score),
create_graph=True)[0]
gp = ((grads.norm(2, dim=1) - 1) ** 2).mean()
return fake_score - real_score + gp_weight * gp # minimise thisBenefits of WGAN:
- No mode collapse in practice
- Loss value is meaningful — it correlates with visual sample quality (unlike vanilla GAN loss)
- More stable training
Example: with a vanilla GAN, the loss can oscillate wildly and gives no indication of quality. With WGAN, as training progresses the Wasserstein loss consistently decreases, and you can use it as a reliable stopping criterion.
Applications
Conditional GAN (cGAN)
Condition both and on an auxiliary label (class, attribute, etc.) for controlled generation:
- Generator: takes as input → generates a sample of class
- Discriminator: takes as input → judges whether matches
Example: Train a cGAN on MNIST conditioned on the digit label. At inference, pass and to get a generated “7”. You can generate any digit on demand without retraining.
Pix2Pix — Image-to-Image Translation
![]()
Pix2Pix: using conditional GANs for paired image-to-image translation.
Isola et al., 2017
A conditional GAN where the condition is a full image (not just a label). Requires paired training images — e.g., (edge map, photo), (semantic mask, street scene), (day, night).
Objective:
Where:
The L1 term encourages low-frequency fidelity; the adversarial term pushes for high-frequency realism.
Input image x ──→ [Generator (U-Net)] ──→ output image ŷ
│
[Discriminator (PatchGAN)] sees (x, y) pairs:
real pair (x, y) → 1
fake pair (x, ŷ) → 0
Applications:
- Sketch → realistic photo
- Semantic segmentation map → street scene photo
- Black & white → colour
- Day photograph → night photograph
- Aerial map → satellite image
Example: Given an architectural blueprint (edge map), Pix2Pix generates a realistic photo of what that building might look like. The discriminator judges whether the photo and the blueprint are a plausible pair, not just whether the photo looks real in isolation.
Limitation: Requires paired images, which are often expensive or impossible to collect (e.g., “photo of an apple” ↔ “photo of an orange”).
CycleGAN — Unpaired Image-to-Image Translation
![]()
CycleGAN: unpaired translation using cycle-consistency.
![]()
Cycle-consistency: from horse to zebra and all the way back to horse.
Zhu et al., 2017
CycleGAN removes the requirement for paired training data. It uses two generators and two discriminators with a cycle-consistency loss.
Setup:
- Domain (e.g., horses), Domain (e.g., zebras)
- Generator , Generator
- Discriminator : real vs. fake in ; Discriminator : real vs. fake in
Cycle-consistency: If you translate a horse to a zebra and back, you should get the original horse:
Objective:
Where the cycle-consistency loss is:
x (horse) ──→ G ──→ ŷ (fake zebra) ──→ F ──→ x̂ (reconstructed horse)
cycle loss: ||x̂ - x||₁
y (zebra) ──→ F ──→ x̂ (fake horse) ──→ G ──→ ŷ (reconstructed zebra)
cycle loss: ||ŷ - y||₁
Applications:
- Horse ↔ Zebra
- Summer ↔ Winter landscape
- Photo ↔ Monet painting
- Apple ↔ Orange
Example: You have a collection of horse photos and a separate collection of zebra photos — no paired images at all. CycleGAN learns to translate between styles. The cycle-consistency loss prevents the generator from making arbitrary, unrelated changes (e.g., it can’t translate an apple to a zebra and still reconstruct the original apple, so it’s forced to only change the visual style).
GauGAN / SPADE — Spatially-Adaptive Normalization
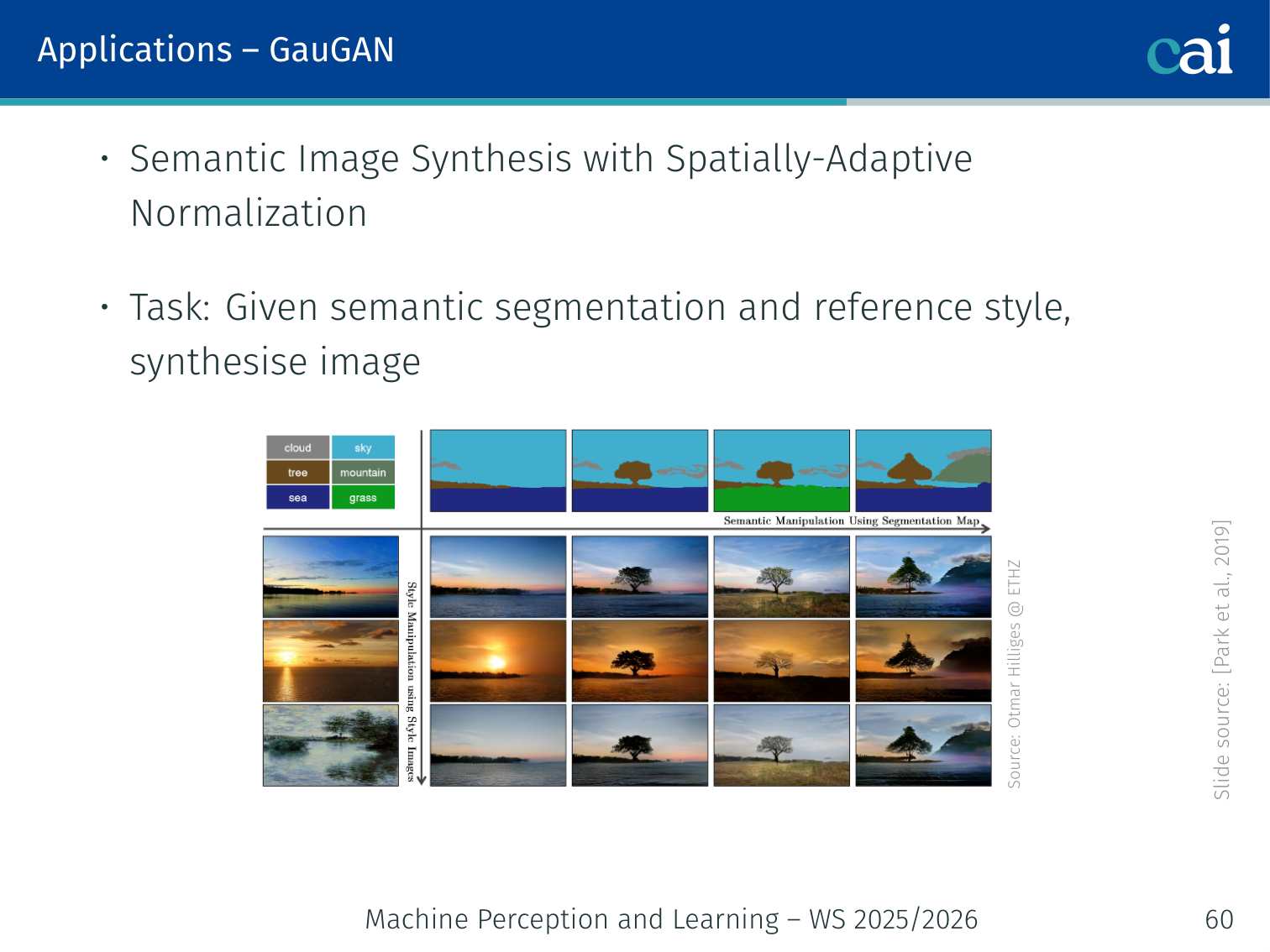
GauGAN: using SPADE to create images from segmentation masks.
Park, Liu, Wang, Zhu (NVIDIA), 2019
Task: Given a semantic segmentation mask and a reference style image, synthesise a photorealistic scene.
Problem with standard conditional normalisation: Unconditional normalisation layers (e.g., BatchNorm) inside the generator “wash away” the semantic label information as activations propagate through the network.
Solution — SPADE (Spatially-Adaptive Denormalization):
Instead of scalar and vectors, SPADE produces spatially-varying modulation tensors:
- Project the segmentation mask into an embedding space
- Apply convolutions to produce and — 2D tensors, not just scalars
- Apply element-wise: normalise the activation, then modulate:
The generator contains a series of SPADE residual blocks with upsampling layers. Each block conditions on the full-resolution semantic map, so spatial information is never lost.
Result: Fine-grained control over what appears where in the generated image.
Example: Draw a rough semantic mask with “sky” at the top, “mountains” in the middle, and “lake” at the bottom. GauGAN renders a photorealistic landscape matching that layout exactly. You can swap the style by providing a different reference image (e.g., a Van Gogh painting) while keeping the same layout.
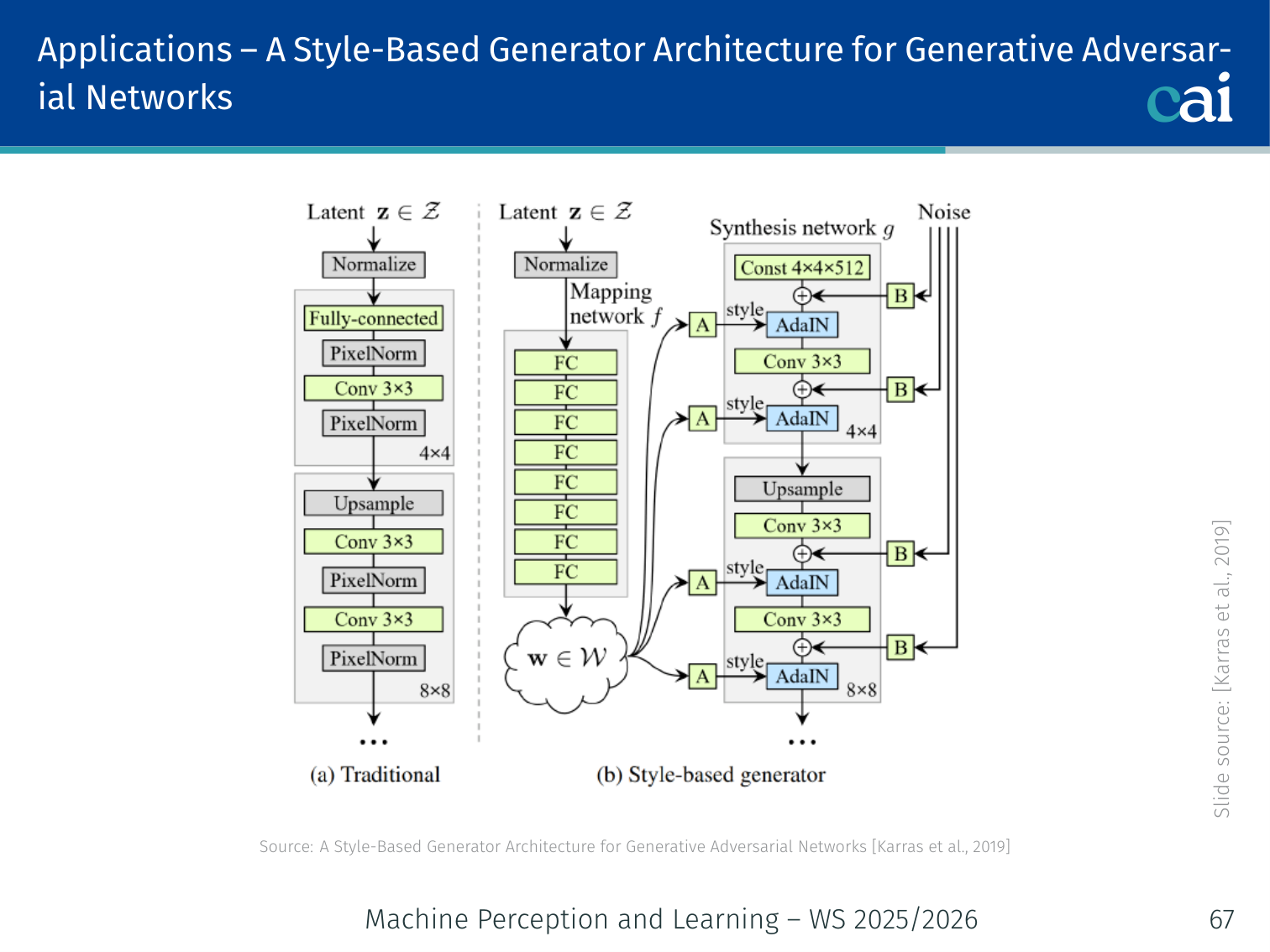
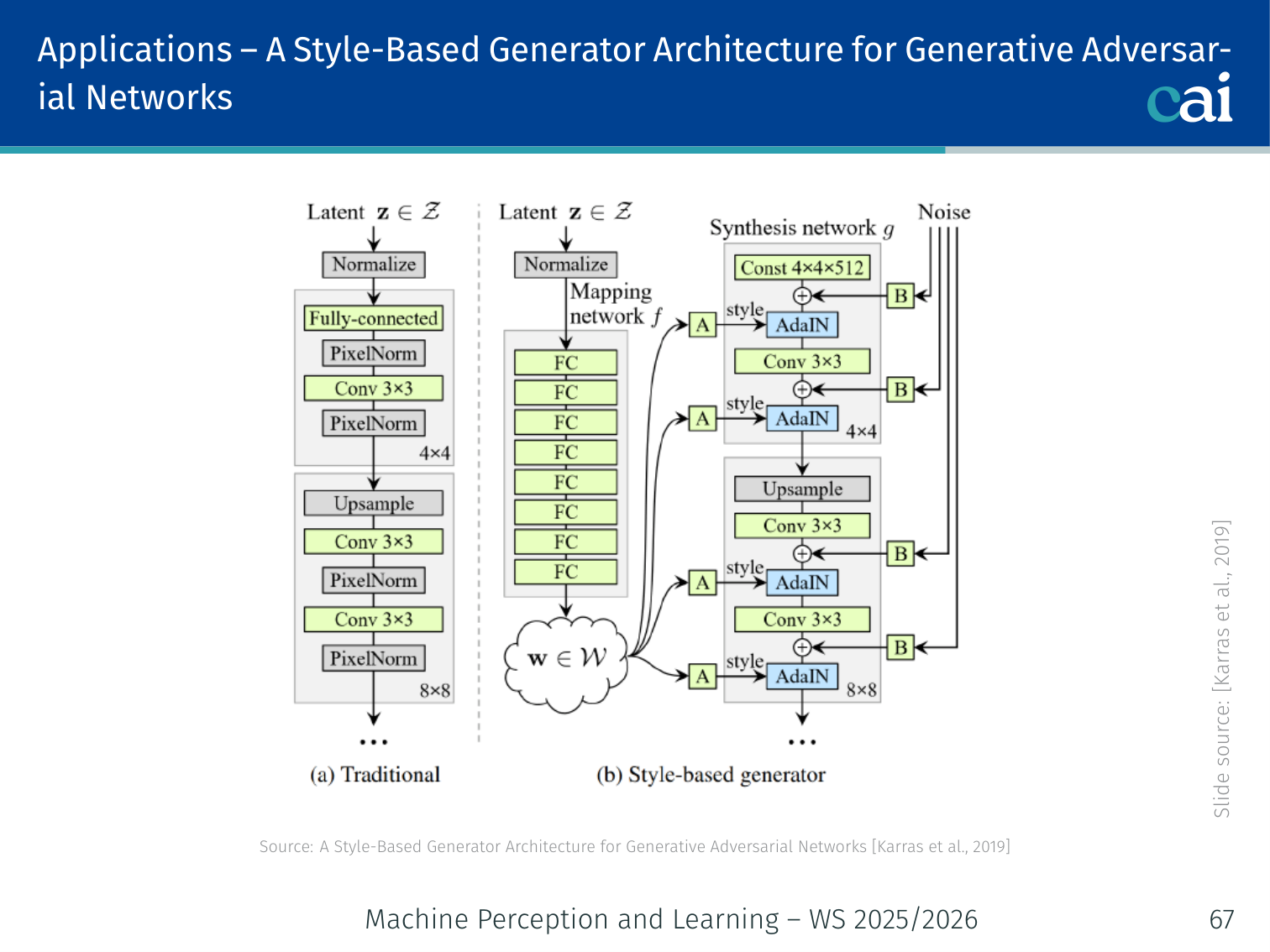
StyleGAN — Style-Based Generator Architecture
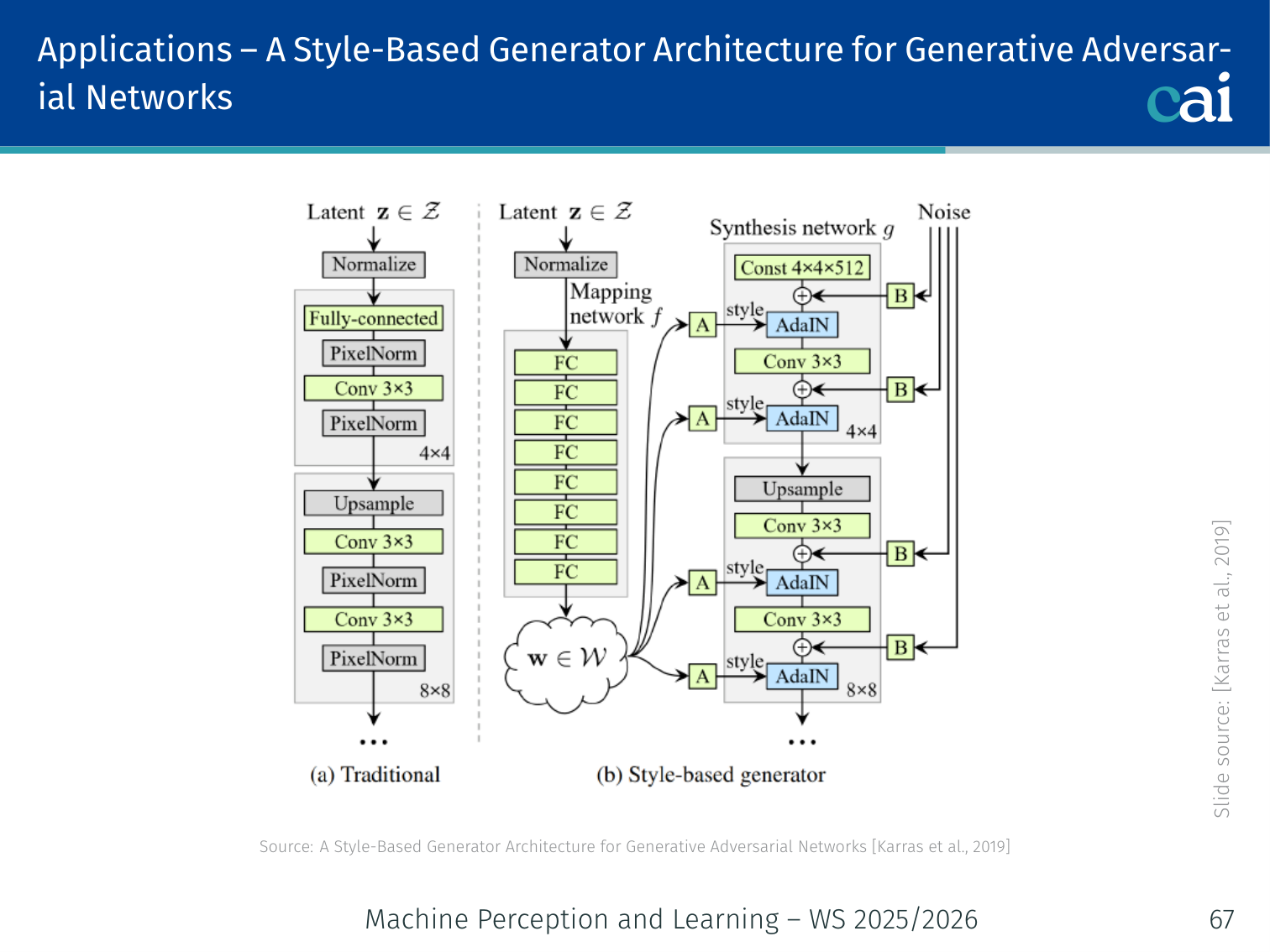
StyleGAN: an overview of the mapping network and AdaIN layers.
Karras, Laine, Aila (NVIDIA), 2019
StyleGAN generates high-resolution photorealistic images (e.g., human faces at 1024×1024) with fine-grained style control.
Key Innovations:
1. Mapping Network
The StyleGAN mapping network: turning noise z into a better latent space w.
→ 8-layer MLP → (disentangled latent space)
The -space is more linearly disentangled than -space — individual dimensions correspond more cleanly to interpretable attributes (age, hair, pose, expression, etc.).
2. Adaptive Instance Normalization (AdaIN)
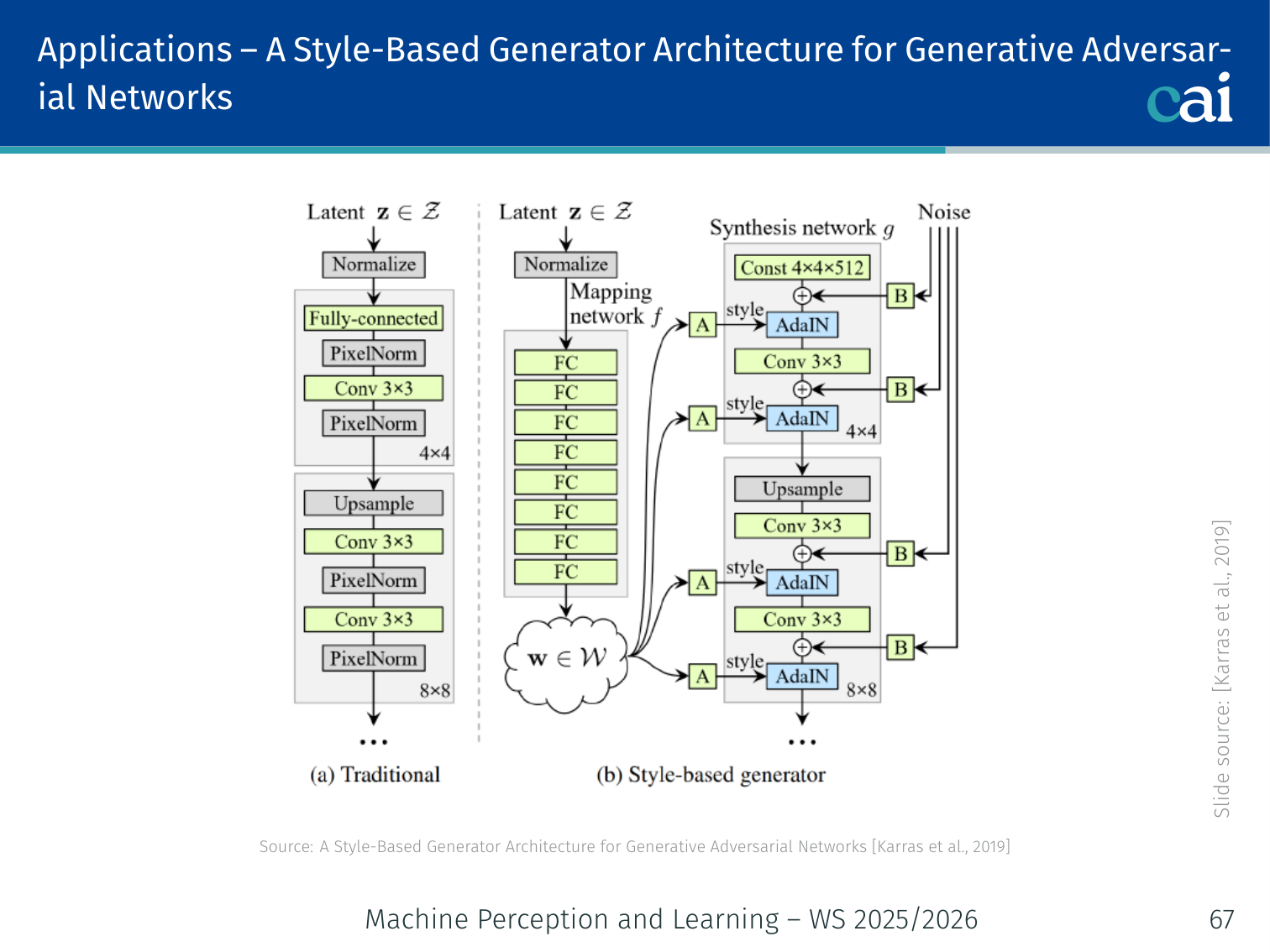
AdaIN: how we inject style directly into the generator.
Style is injected at each resolution by modulating intermediate features:
Where are learned affine transforms of . This is how “style” (colour palette, texture, coarse structure) is controlled at each scale.
3. Progressive Growing
Progressive growing: starting small and getting bigger for more stable GANs.
Training starts at low resolution (4×4) and progressively adds layers for higher resolutions (4×4 → 8×8 → 16×16 → … → 1024×1024). This produces stable, high-quality training by starting with easy, coarse structure before refining fine details.
4. Style Mixing
At inference, use for early (coarse) layers and for later (fine) layers. This creates hybrid outputs — e.g., the face shape and pose of person A combined with the hair colour and skin texture of person B.
| Style level | Controls |
|---|---|
| Coarse (4×4–8×8) | Pose, face shape, hair type |
| Middle (16×16–32×32) | Facial features, eye shape |
| Fine (64×64–1024×1024) | Colour scheme, micro-texture |
Example:
thispersondoesnotexist.comgenerates realistic human faces using StyleGAN. None of the people exist — every image is synthesised from scratch from random noise. Refresh the page to get a completely different face.
Case Study: GANs for Gaze Redirection
A case study on using GANs for eye gaze redirection.
(He, Spurr, Zhang, Hilliges — ICCV 2019)
Motivation
Appearance-based gaze estimation requires large datasets annotated with ground-truth gaze angles, collected using expensive eye-tracking equipment under diverse conditions (illumination, head pose, gaze angle). Key datasets:
| Dataset | Notes |
|---|---|
| MPIIGaze (Zhang et al., 2015) | In-the-wild appearance-based gaze |
| GazeCapture (Krafka et al., 2016) | Mobile device eye tracking |
| ETH-XGaze (Zhang et al., 2020) | Extreme head pose and gaze variation |
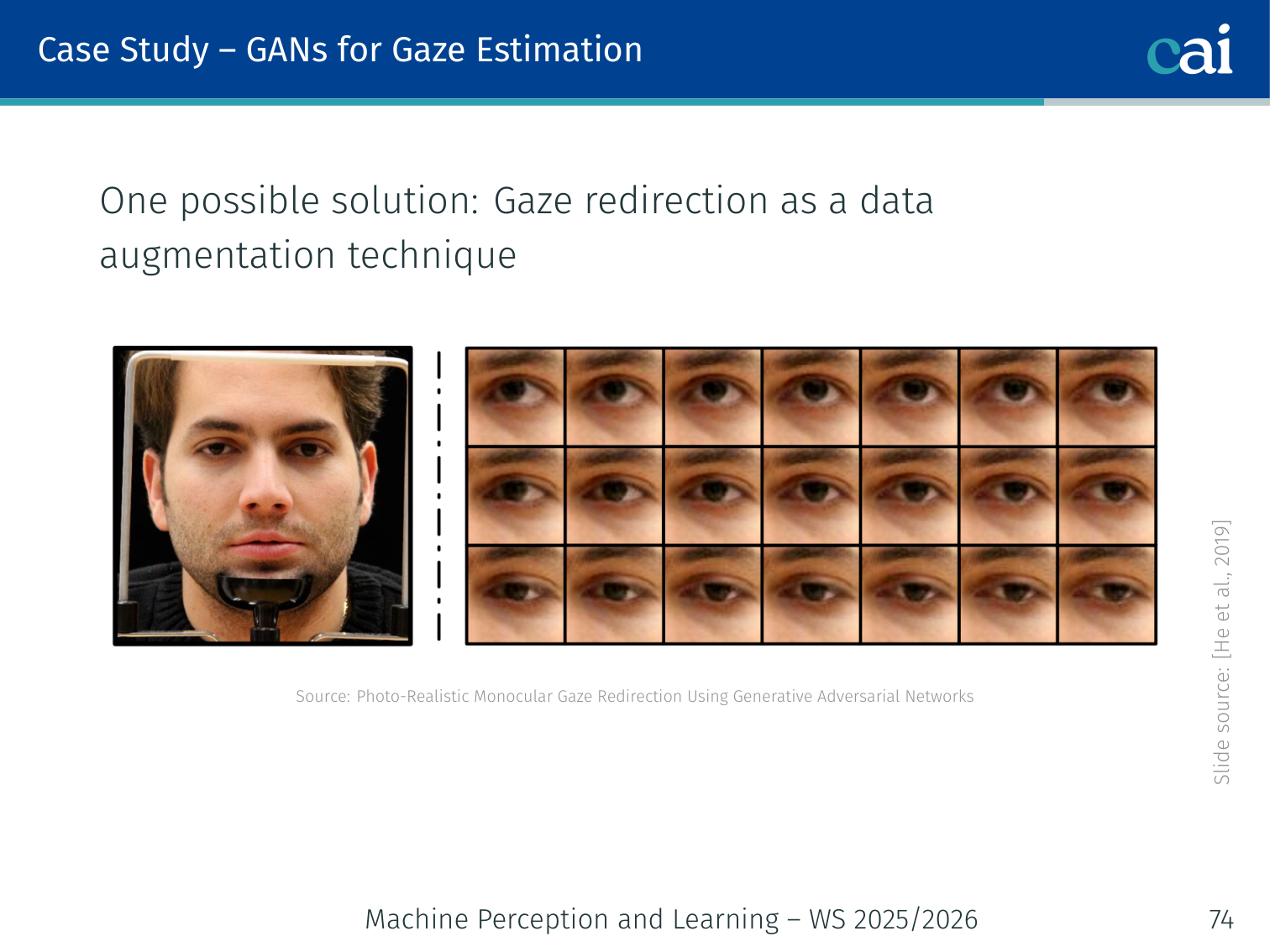
One solution: Use GANs for gaze redirection as data augmentation — take existing images and synthesise versions with arbitrary target gaze angles.
Task Definition
What is gaze redirection? Transforming eyes to look where we want.
Given an input eye image with gaze direction (yaw, pitch), learn a generator that redirects the gaze to a target direction :
Two requirements:
- must look photo-realistic and consistent with
- The gaze in must actually point in direction
Conditional GAN Framework
The conditional GAN setup for gaze redirection with a dual-purpose discriminator.
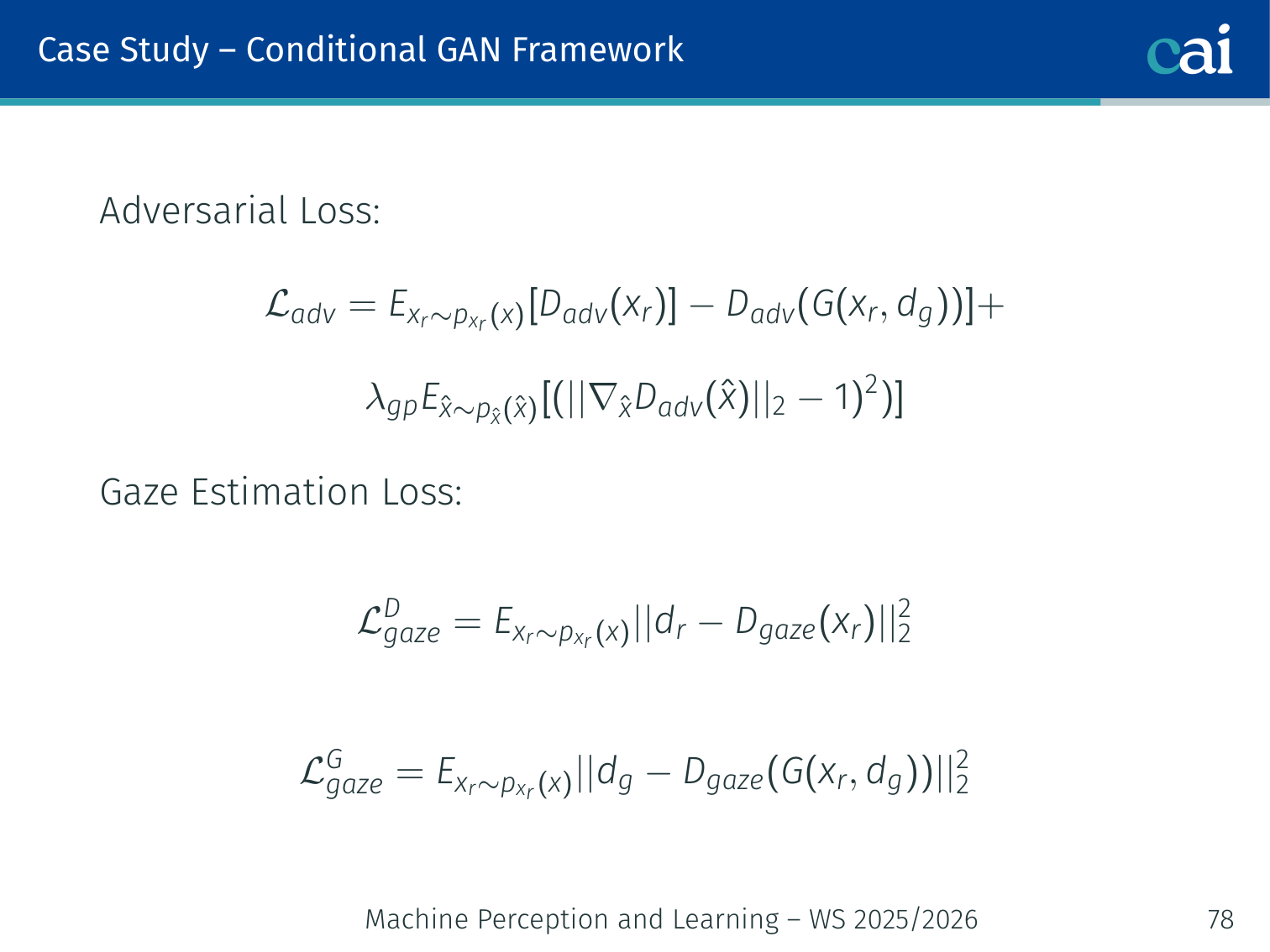
The losses we use for gaze redirection: adversarial, gaze, reconstruction, and perceptual.
This is the first GAN-based method for monocular gaze redirection. It uses a WGAN-GP framework with a dual-purpose discriminator that simultaneously judges realism and gaze correctness.
1. Adversarial Loss (Wasserstein with gradient penalty):
2. Gaze Estimation Loss (discriminator also acts as a gaze estimator):
3. Reconstruction Loss (cycle-consistency — redirect then redirect back):
4. Perceptual Loss (using VGG-16 features, inspired by Johnson et al., 2016):
Where is the -th activation of a pretrained VGG-16, and is the Gram matrix (captures style/texture).
Overall Objectives
Evaluation Metric: LPIPS
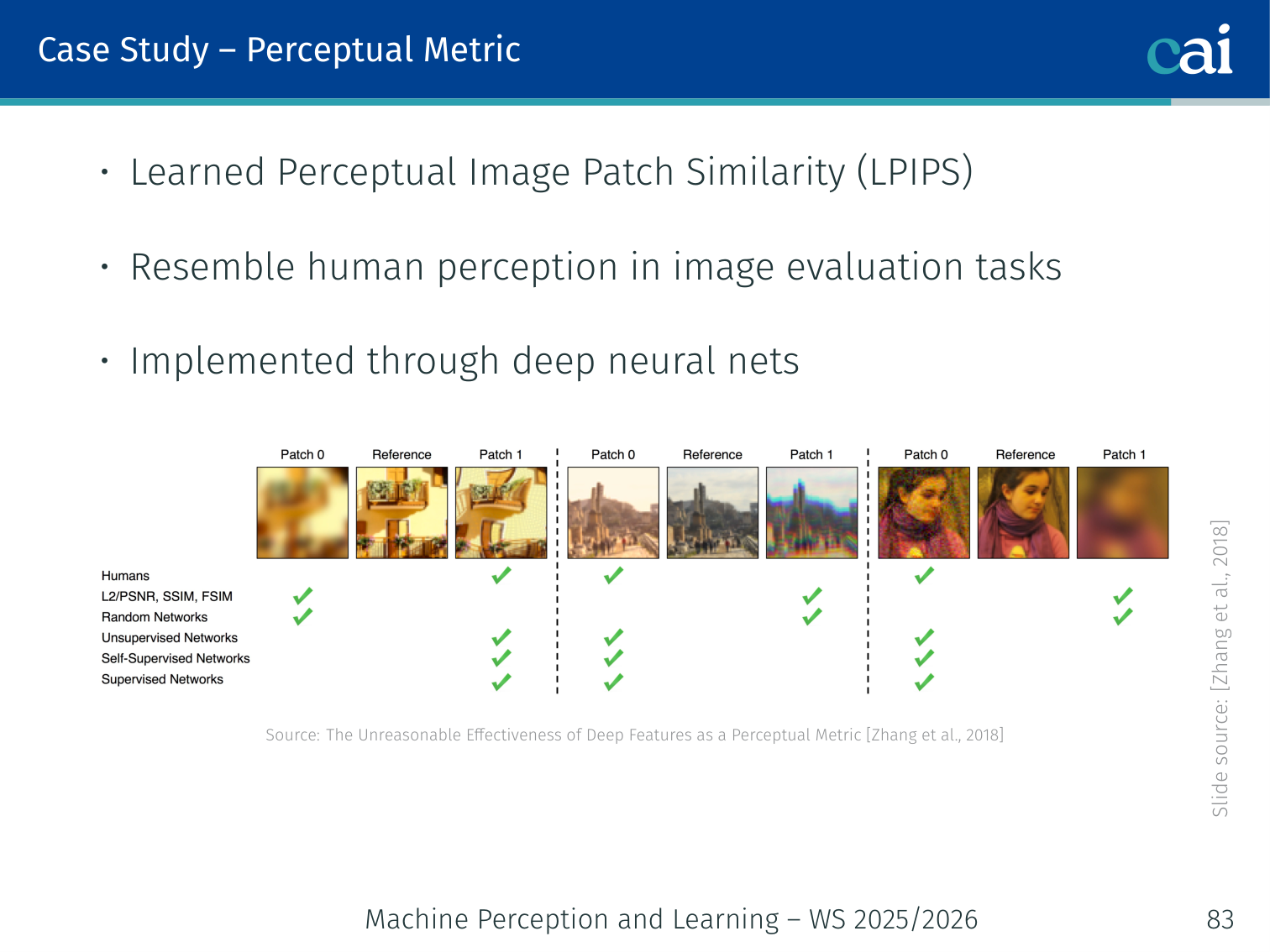
LPIPS: a learned metric for comparing how similar image patches look.
Perceptual quality is evaluated using LPIPS (Learned Perceptual Image Patch Similarity, Zhang et al., 2018):
- Uses deep neural network features to compare images
- Designed to match human perceptual judgements
- Better than pixel-wise metrics (PSNR, SSIM) for evaluating generated image quality
Key Contributions
A wrap-up of the key takeaways from the gaze redirection case study.
- First GAN-based method for gaze redirection from monocular images
- Novel dual-purpose discriminator — judges both realism and gaze direction
- One of the first works to demonstrate synthetic image augmentation improving real gaze estimation model performance
Evaluation Metrics for GANs
| Metric | Measures | Direction |
|---|---|---|
| FID (Fréchet Inception Distance) | Distributional similarity to real data | Lower is better |
| IS (Inception Score) | Quality + diversity jointly | Higher is better |
| LPIPS | Perceptual similarity to a reference | Lower is better |
| Precision & Recall | Quality vs. diversity separately | Both higher |
FID — The Standard Metric
Extract InceptionV3 features from real and generated images. Fit Gaussians to each feature set. Compute:
Lower FID means the generated distribution is closer to the real one. FID captures both quality (fidelity) and diversity, making it the de facto standard.
Example: A mode-collapsed GAN that generates only one type of face might have high per-image quality but terrible FID, because its distribution barely overlaps with the full real data distribution. IS might still give it a decent score. FID reliably catches both issues.
Summary: GAN Variants
| GAN Variant | Key Innovation | Paper |
|---|---|---|
| Vanilla GAN | Minimax game, JS divergence | Goodfellow et al., 2014 |
| DCGAN | Convolutional architecture, BatchNorm | Radford et al., 2015 |
| WGAN / WGAN-GP | Wasserstein distance, stable training | Arjovsky et al., 2017 |
| cGAN | Condition on labels for controlled generation | Mirza & Osindero, 2014 |
| Pix2Pix | Condition on paired images | Isola et al., 2017 |
| CycleGAN | Unpaired translation via cycle-consistency | Zhu et al., 2017 |
| GauGAN / SPADE | Spatially-adaptive normalization | Park et al., 2019 |
| StyleGAN | Disentangled -space, AdaIN | Karras et al., 2019 |
Final Comparison: VAEs vs GANs
| VAE | GAN | |
|---|---|---|
| Training | Easier (single optimisation) | Hard (adversarial, mode collapse risk) |
| Inference | Explicit | Implicit |
| Image quality | Blurry | Sharp |
| Density access | Lower bound | None (likelihood-free) |
GANs have largely been superseded by diffusion models for highest-quality generation, but adversarial training and discriminators remain influential — appearing in perceptual loss networks, data augmentation pipelines, and as discriminators in hybrid models.
PyTorch Implementation: DCGAN
Deep Convolutional GANs (DCGAN) replaced the standard MLPs of the original GAN with convolutional layers, greatly improving stability and image quality.
import torch
import torch.nn as nn
# 1. The GENERATOR: Maps noise 'z' to an Image
class Generator(nn.Module):
def __init__(self, nz=100, ngf=64, nc=1):
super().__init__()
self.main = nn.Sequential(
# Input is noise z, shape (Batch, 100, 1, 1)
# ConvTranspose2d performs UPSAMPLING
nn.ConvTranspose2d(nz, ngf * 4, 4, 1, 0, bias=False),
nn.BatchNorm2d(ngf * 4),
nn.ReLU(True),
# Upsample to 8x8
nn.ConvTranspose2d(ngf * 4, ngf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 2),
nn.ReLU(True),
# Upsample to 16x16
nn.ConvTranspose2d(ngf * 2, ngf, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf),
nn.ReLU(True),
# Final layer maps to 32x32 image (nc=3 for RGB, 1 for Grayscale)
nn.ConvTranspose2d(ngf, nc, 4, 2, 1, bias=False),
# Tanh scales output pixels to [-1, 1]
nn.Tanh()
)
def forward(self, x):
return self.main(x)
# 2. The DISCRIMINATOR: Maps an Image to a Probability [0, 1]
class Discriminator(nn.Module):
def __init__(self, nc=1, ndf=64):
super().__init__()
self.main = nn.Sequential(
# Standard Conv2d performs DOWNSAMPLING
# Input: (Batch, nc, 32, 32)
nn.Conv2d(nc, ndf, 4, 2, 1, bias=False),
# LeakyReLU is standard for GAN discriminators
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(ndf, ndf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ndf * 2),
nn.LeakyReLU(0.2, inplace=True),
# Final convolution reduces to a 1x1 scalar
nn.Conv2d(ndf * 2, 1, 7, 1, 0, bias=False),
# Sigmoid outputs probability of image being REAL
nn.Sigmoid()
)
def forward(self, x):
# Flatten the output to a single dimension (Batch_size,)
return self.main(x).view(-1)Key GAN Concepts:
- Upsampling vs. Downsampling: The Generator uses
ConvTranspose2dto turn a small noise vector into a large image. The Discriminator uses standardConv2dto condense an image into a single “real or fake” score. - Binary Cross-Entropy (BCE): GANs are typically trained with BCE. The Discriminator wants to output 1 for real images and 0 for fake ones. The Generator wants to trick it into outputting 1 for fakes.
- Batch Normalization: Essential for preventing the GAN from collapsing into a single output mode early in training.
Further Reading
- GAN Zoo (hundreds of GAN variants): https://github.com/hindupuravinash/the-gan-zoo
- Tips and tricks for training GANs: https://github.com/soumith/ganhacks
References
- Goodfellow, Pouget-Abadie, Mirza, Xu, Warde-Farley, Ozair, Courville, Bengio (2014). Generative Adversarial Nets. NeurIPS.
- Arjovsky, Chintala, Bottou (2017). Wasserstein GAN. arXiv:1701.07875.
- Isola, Zhu, Zhou, Efros (2017). Image-to-Image Translation with Conditional Adversarial Networks. CVPR.
- Zhu, Park, Isola, Efros (2017). Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. ICCV.
- Park, Liu, Wang, Zhu (2019). Semantic Image Synthesis with Spatially-Adaptive Normalization. CVPR.
- Karras, Laine, Aila (2019). A Style-Based Generator Architecture for Generative Adversarial Networks. CVPR.
- He, Spurr, Zhang, Hilliges (2019). Photo-Realistic Monocular Gaze Redirection Using Generative Adversarial Networks. ICCV.
- Metz, Poole, Pfau, Sohl-Dickstein (2017). Unrolled Generative Adversarial Networks. arXiv:1611.02163.
- Nowozin, Cseke, Tomioka (2016). f-GAN: Training Generative Neural Samplers using Variational Divergence Minimization. NIPS.
- Zhang, Isola, Efros, Shechtman, Wang (2018). The Unreasonable Effectiveness of Deep Features as a Perceptual Metric. CVPR.
- Zhang, Sugano, Fritz, Bulling (2015). Appearance-Based Gaze Estimation in the Wild. CVPR.
- Krafka, Khosla, Kellnhofer et al. (2016). Eye Tracking for Everyone. CVPR.
- Zhang, Park, Beeler, Bradley, Tang, Hilliges (2020). ETH-XGaze: A Large Scale Dataset for Gaze Estimation under Extreme Head Pose and Gaze Variation. ECCV.
Applied Exam Focus
- Min-Max Game: The Generator tries to fool the Discriminator, while the Discriminator tries to distinguish real from fake. This is a Nash Equilibrium problem.
- Mode Collapse: Occurs when the Generator discovers a single “safe” output that fools the Discriminator and stops producing diverse samples.
- WGAN: Uses the Earth Mover (Wasserstein) Distance to provide smoother gradients even when the real and fake distributions don’t overlap.
Previous: L09 — VAE | Back to MPL Index | Next: (y-11) RL | (y) Return to Notes | (y) Return to Home